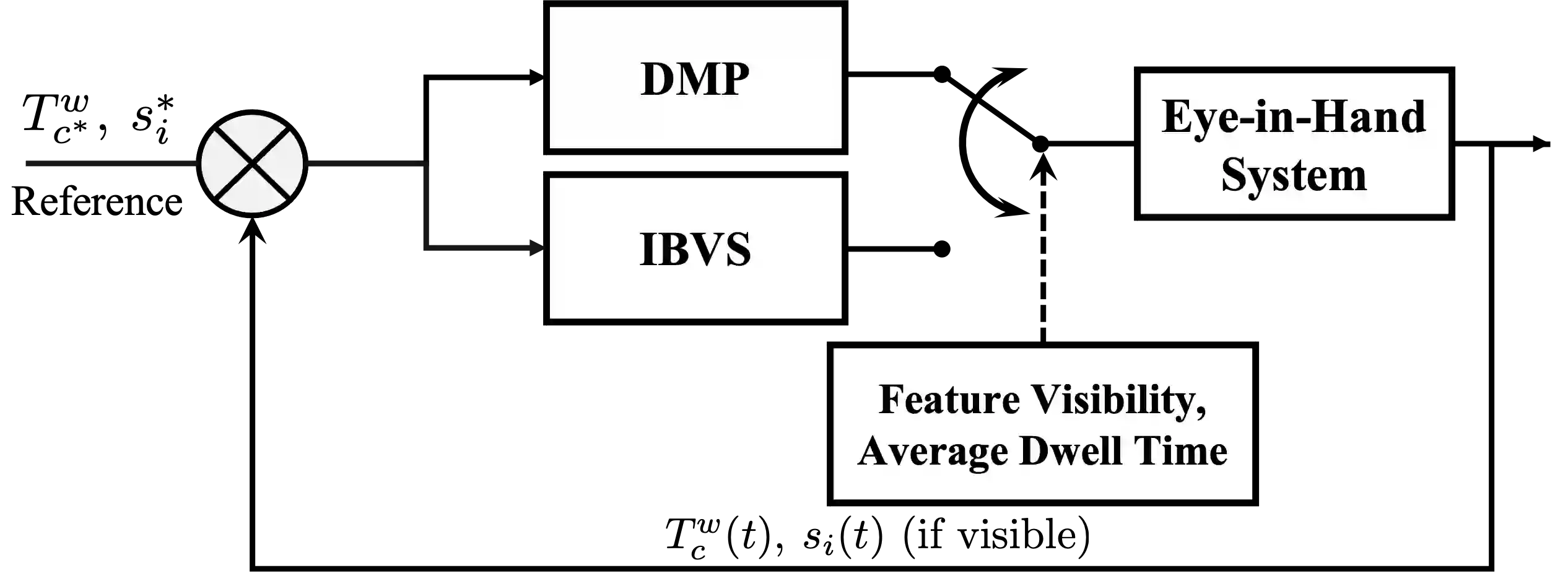
Utilizing perception for feedback control in combination with Dynamic Movement Primitive (DMP)-based motion generation for a robot's end-effector control is a useful solution for many robotic manufacturing tasks. For instance, while performing an insertion task when the hole or the recipient part is not visible in the eye-in-hand camera, a learning-based movement primitive method can be used to generate the end-effector path. Once the recipient part is in the field of view (FOV), Image-based Visual Servo (IBVS) can be used to control the motion of the robot. Inspired by such applications, this paper presents a generalized control scheme that switches between motion generation using DMPs and IBVS control. To facilitate the design, a common state space representation for the DMP and the IBVS systems is first established. Stability analysis of the switched system using multiple Lyapunov functions shows that the state trajectories converge to a bound asymptotically. The developed method is validated by two real world experiments using the eye-in-hand configuration on a Baxter research robot.
翻译:利用感知反馈控制与基于动态运动基元(DMP)的机器人末端执行器运动生成相结合,是许多机器人制造任务的有效解决方案。例如,在执行插入任务时,若手眼相机无法观察到孔洞或目标部件,可采用基于学习的运动基元方法生成末端执行器路径。一旦目标部件进入视野(FOV),即可使用基于图像的视觉伺服(IBVS)控制机器人运动。受此类应用启发,本文提出一种在DMP运动生成与IBVS控制之间切换的广义控制方案。为便于设计,首先建立了DMP与IBVS系统的通用状态空间表示。利用多李雅普诺夫函数对切换系统进行稳定性分析,表明状态轨迹渐近收敛于有界区域。通过Baxter研究机器人手眼配置的两组实际实验验证了所提方法的有效性。