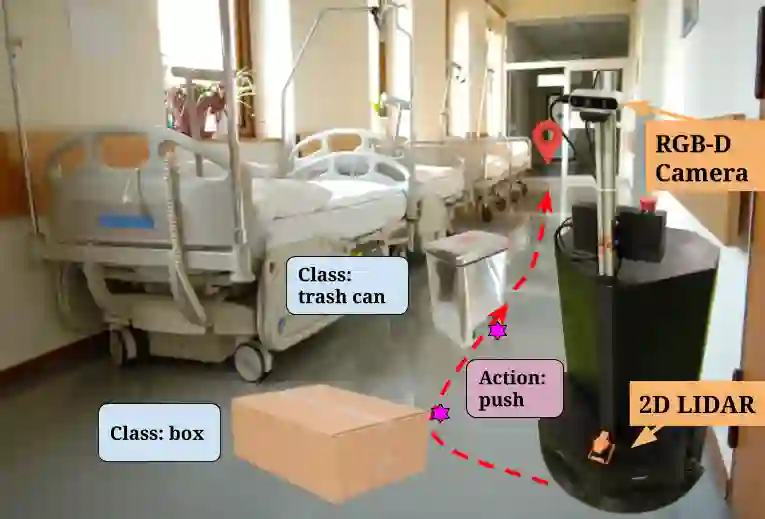
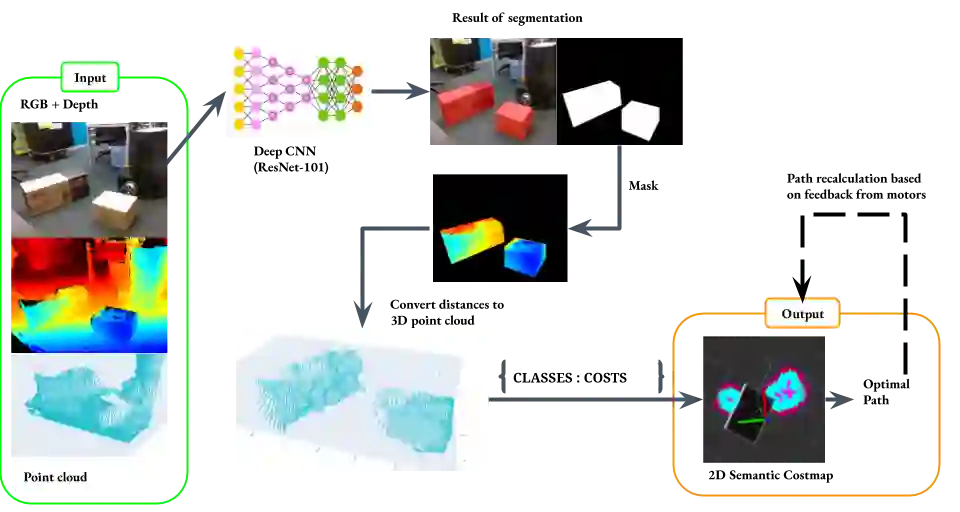
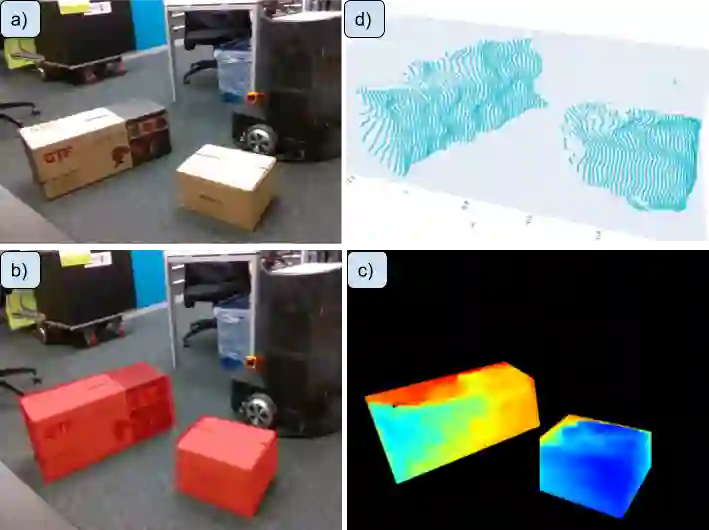
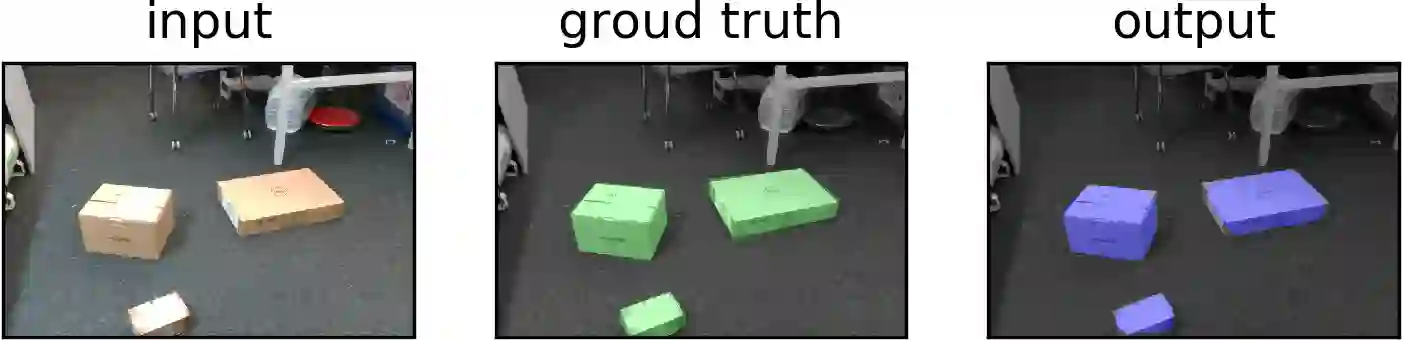
In this paper, we propose a novel approach to wheeled robot navigation through an environment with movable obstacles. A robot exploits knowledge about different obstacle classes and selects the minimally invasive action to perform to clear the path. We trained a convolutional neural network (CNN), so the robot can classify an RGB-D image and decide whether to push a blocking object and which force to apply. After known objects are segmented, they are being projected to a cost-map, and a robot calculates an optimal path to the goal. If the blocking objects are allowed to be moved, a robot drives through them while pushing them away. We implemented our algorithm in ROS, and an extensive set of simulations showed that the robot successfully overcomes the blocked regions. Our approach allows a robot to successfully build a path through regions, where it would have stuck with traditional path-planning techniques.
翻译:本文提出了一种轮式机器人在存在可移动障碍物的环境中进行导航的新方法。机器人利用不同障碍物类别的知识,选择对清理路径干扰最小的动作。我们训练了一个卷积神经网络(CNN),使机器人能够分类RGB-D图像,并决定是否推挤阻塞物体以及施加多大的力。在已知物体被分割后,它们被投影到代价地图上,机器人据此计算到达目标的最优路径。若阻塞物体允许移动,机器人会在推动它们的同时穿行通过。我们在ROS中实现了该算法,并通过大量仿真证明机器人成功克服了阻塞区域。该方法使机器人能够在传统路径规划技术无法通过的区域内成功构建路径。