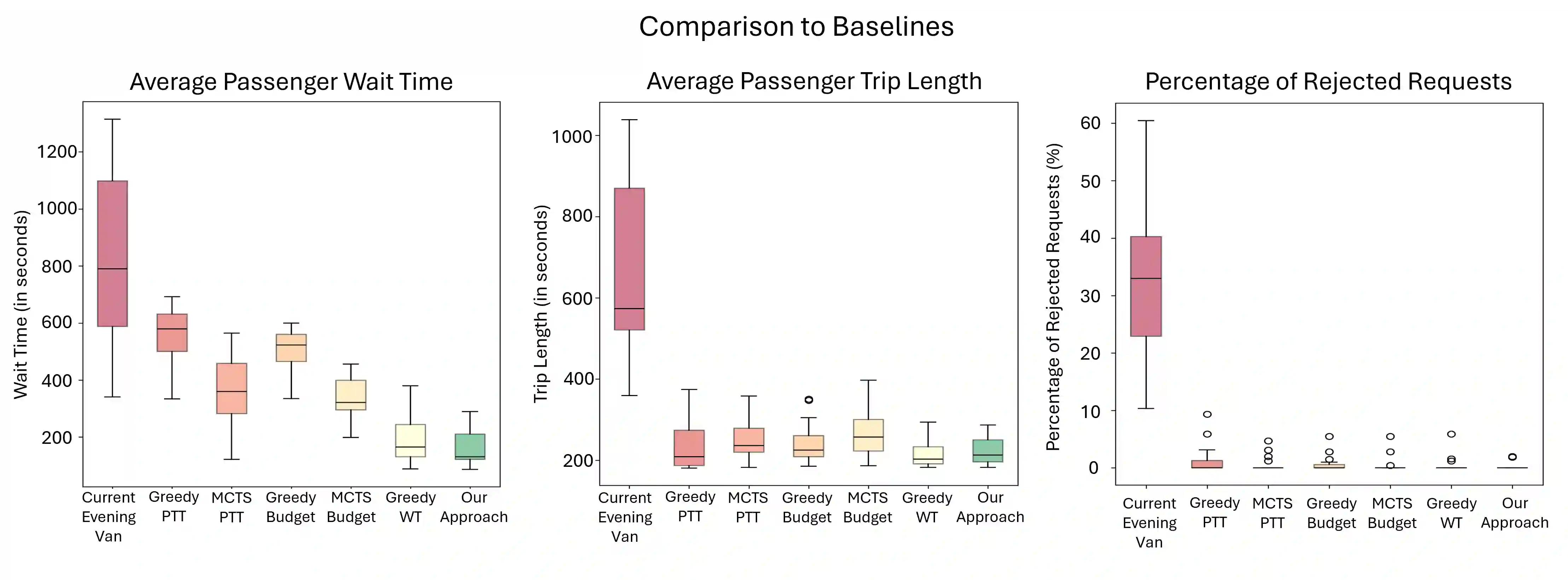
We consider a multi-robot setting, where we have a fleet of multi-capacity autonomous robots that must service spatially distributed pickup-and-delivery requests with fixed maximum wait times. Requests can be either scheduled ahead of time or they can enter the system in real-time. In this setting, stability for a routing policy is defined as the cost of the policy being uniformly bounded over time. Most previous work either solve the problem offline to theoretically maintain stability or they consider dynamically arriving requests at the expense of the theoretical guarantees on stability. In this paper, we aim to bridge this gap by proposing a novel proactive rollout-based routing framework that adapts to real-time demand while still provably maintaining the stability of the learned routing policy. We derive provable stability guarantees for our method by proposing a fleet sizing algorithm that obtains a sufficiently large fleet that ensures stability by construction. To validate our theoretical results, we consider a case study on real ride requests for Harvard's evening Van System. We also evaluate the performance of our framework using the currently deployed smaller fleet size. In this smaller setup, we compare against the currently deployed routing algorithm, greedy heuristics, and Monte-Carlo-Tree-Search-based algorithms. Our empirical results show that our framework maintains stability when we use the sufficiently large fleet size found in our theoretical results. For the smaller currently deployed fleet size, our method services 6% more requests than the closest baseline while reducing median passenger wait times by 33%.
翻译:本文研究多机器人系统,其中包含一支多容量自主机器人车队,需在固定最长等待时间内服务空间分布的取送请求。请求可预先调度,亦可实时进入系统。在此场景中,路由策略的稳定性定义为策略成本随时间保持一致有界。现有研究大多通过离线求解以理论维持稳定性,或考虑动态到达请求但牺牲稳定性理论保证。本文旨在弥合这一差距,提出一种基于主动滚动的创新路由框架,既能适应实时需求,又可证明维持学习路由策略的稳定性。通过设计车队规模算法获得充分大的车队规模,从构造上确保稳定性,从而为方法提供可证明的稳定性保证。为验证理论结果,我们以哈佛大学晚间班车系统的真实乘车请求进行案例研究,并使用当前部署的较小车队规模评估框架性能。在此较小配置下,与当前部署路由算法、贪婪启发式算法及基于蒙特卡洛树搜索的算法进行对比。实证结果表明:采用理论结果所得的充分大队列规模时,本框架能保持稳定性;在当前部署的较小车队规模下,本方法比最优基线多服务6%的请求,同时将乘客中位等待时间降低33%。