
自主远程巡飞弹药系统需要具备强大的机载感知架构,能够在杂乱的战场环境中,在严格的计算和功耗限制下,检测、分类和判别战术目标。本文提出了一种用于持久续航级自主打击无人机平台实时机载目标检测的嵌入式人工智能视觉流水线设计与实现框架。所提出的架构集成了轻量级深度学习目标检测网络、多传感器预处理、置信度驱动判别逻辑和图形处理器加速的边缘推理模块,以实现在全球导航卫星系统降级和通信受限的操作环境中的可靠感知。基于仿真的评估表明,优化的卷积神经网络检测器在杂乱地形条件下的推理延迟低于120毫秒,检测精度超过90%。该框架为自主开发支持情报监视侦察-打击融合架构的自主巡飞弹药打击感知系统,建立了一个可扩展的基准。
本研究开发了一个结构化的嵌入式人工智能感知框架,针对在具有挑战性的操作条件下运作的持久续航级巡飞弹药打击系统进行了优化,这些条件包括伪装干扰、植被遮挡、城市背景杂波、低对比度地形环境以及全球导航卫星系统拒止导航场景,如图1所示。该框架集成了轻量级深度学习检测、多级置信度融合以及基于混合跟踪的身份持久性,并将其纳入一个为长航时自主任务量身定制的功耗感知型嵌入式推理架构中。
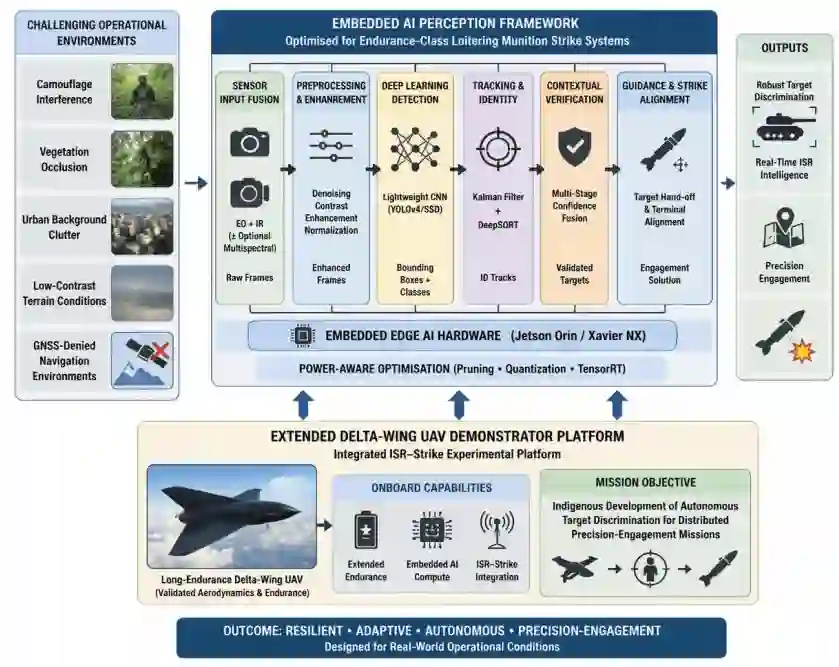
图1:适用于在复杂、遮挡及全球导航卫星系统拒止战场环境中运作的持久续航级巡飞弹药系统的结构化嵌入式人工智能感知框架。
所提出的架构将先前经过验证的长航时三角翼无人机验证平台扩展为一个集成的“情报监视侦察-打击”实验框架,以支持自主目标判别能力的自主开发,用于复杂战场环境下的分布式精确交战行动。
成为VIP会员查看完整内容
相关内容

最新内容
相关VIP内容
相关资讯