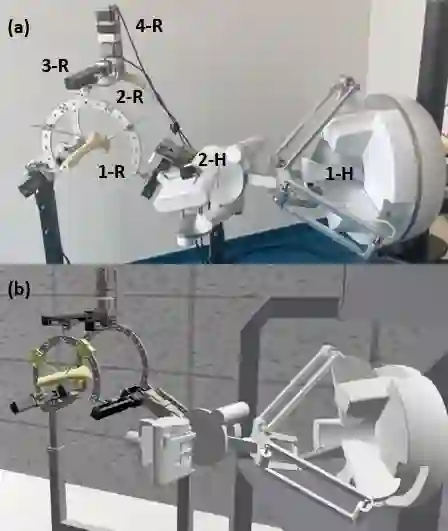
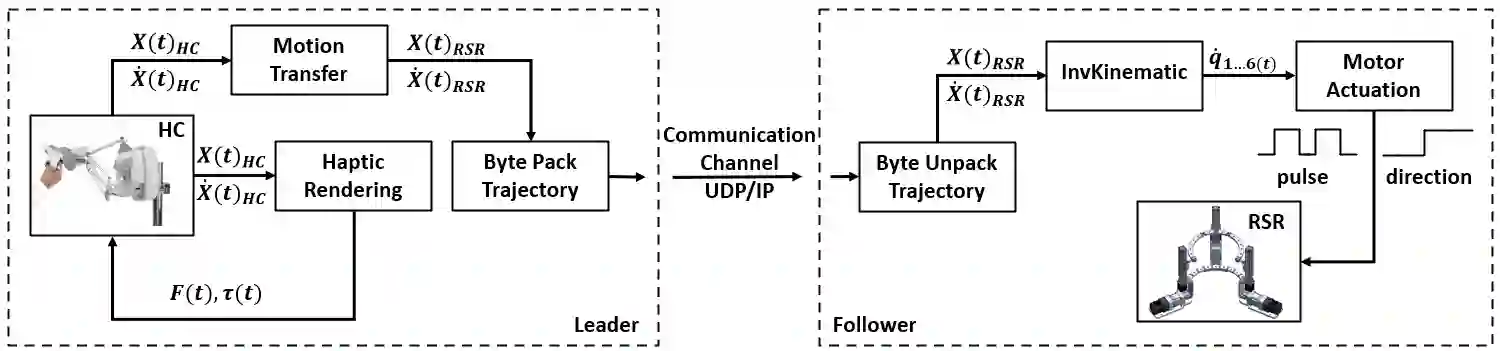
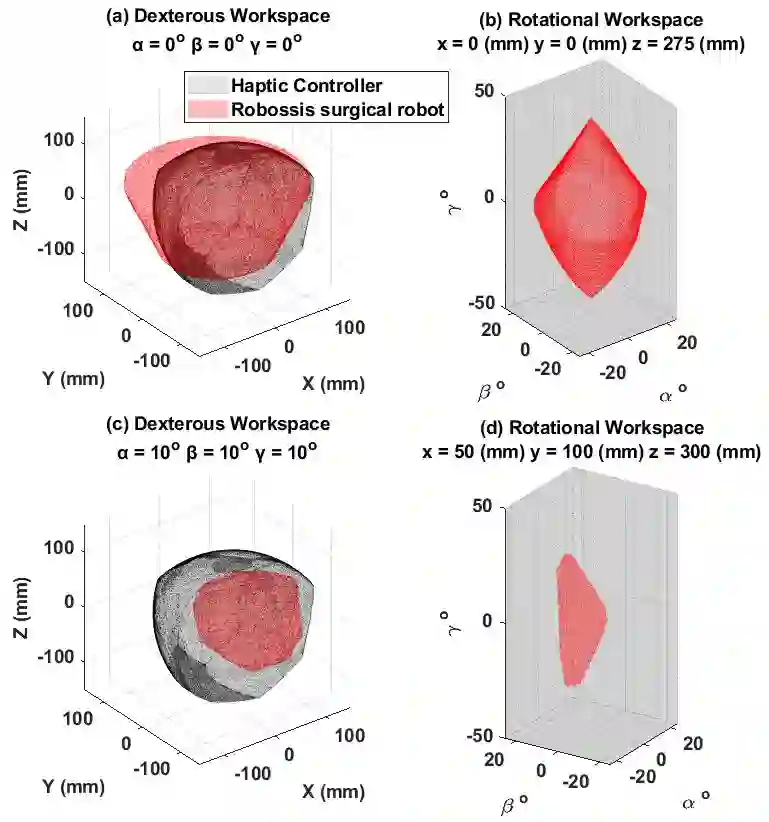
In the face of challenges encountered during femur fracture surgery, such as the high rates of malalignment and X-ray exposure to operating personnel, robot-assisted surgery has emerged as an alternative to conventional state-of-the-art surgical methods. This paper introduces the development of Robossis, a haptic system for robot-assisted femur fracture surgery. Robossis comprises a 7-DOF haptic controller and a 6-DOF surgical robot. A unilateral control architecture is developed to address the kinematic mismatch and the motion transfer between the haptic controller and the Robossis surgical robot. A real-time motion control pipeline is designed to address the motion transfer and evaluated through experimental testing. The analysis illustrates that the Robossis surgical robot can adhere to the desired trajectory from the haptic controller with an average translational error of 0.32 mm and a rotational error of 0.07 deg. Additionally, a haptic rendering pipeline is developed to resolve the kinematic mismatch by constraining the haptic controller (user hand) movement within the permissible joint limits of the Robossis surgical robot. Lastly, in a cadaveric lab test, the Robossis system assisted surgeons during a mock femur fracture surgery. The result shows that Robossis can provide an intuitive solution for surgeons to perform femur fracture surgery.
翻译:针对股骨骨折手术中存在的对位不良率高、操作人员X射线暴露风险大等挑战,机器人辅助手术已成为传统先进手术方法的替代方案。本文介绍了一种用于机器人辅助股骨骨折手术的触觉系统Robossis的研发过程。Robossis由一台7自由度触觉控制器和一台6自由度手术机器人组成。为克服触觉控制器与Robossis手术机器人之间的运动学不匹配及运动传递问题,设计了一种单边控制架构。针对运动传递问题,开发了实时运动控制管线,并通过实验测试对其进行了评估。分析表明,Robossis手术机器人能够遵循触觉控制器的期望轨迹,平均平移误差为0.32毫米,旋转误差为0.07度。此外,还开发了触觉渲染管线,通过将触觉控制器(用户手部)的运动限制在Robossis手术机器人允许的关节范围内,以解决运动学不匹配问题。最后,在尸体实验室测试中,Robossis系统在模拟股骨骨折手术中为外科医生提供了辅助。结果表明,Robossis可为外科医生执行股骨骨折手术提供直观的解决方案。