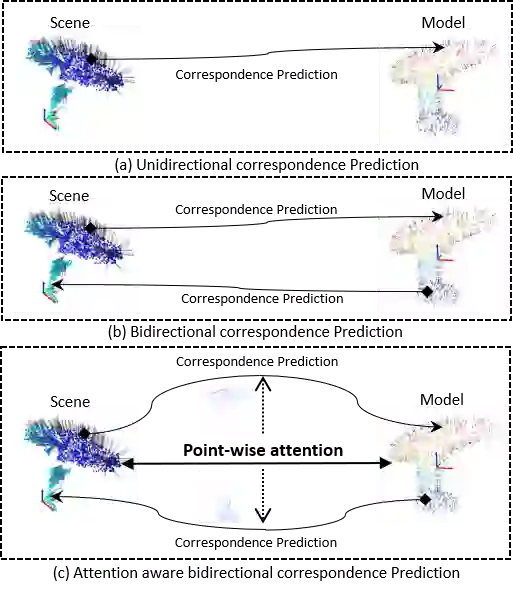
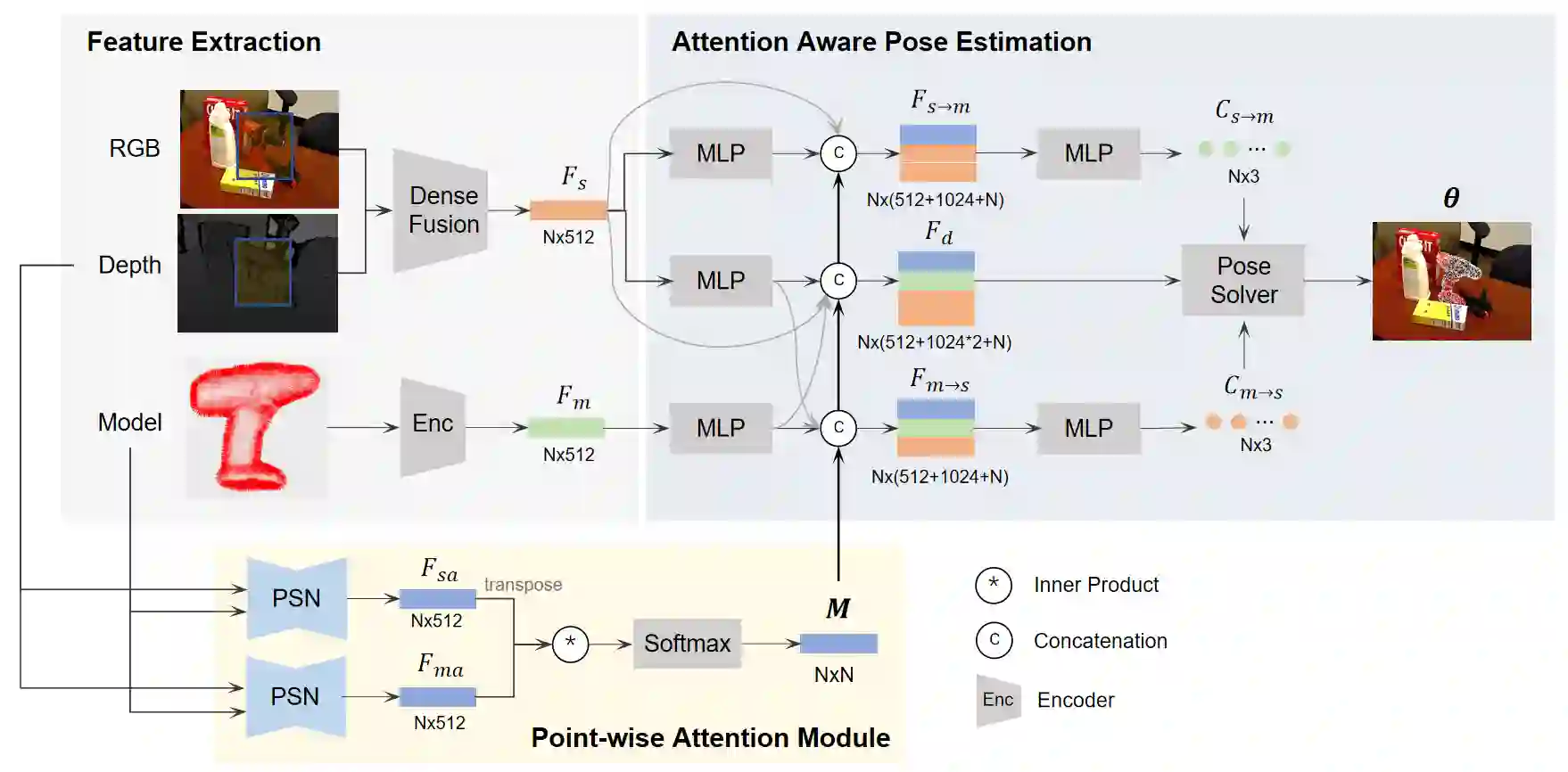
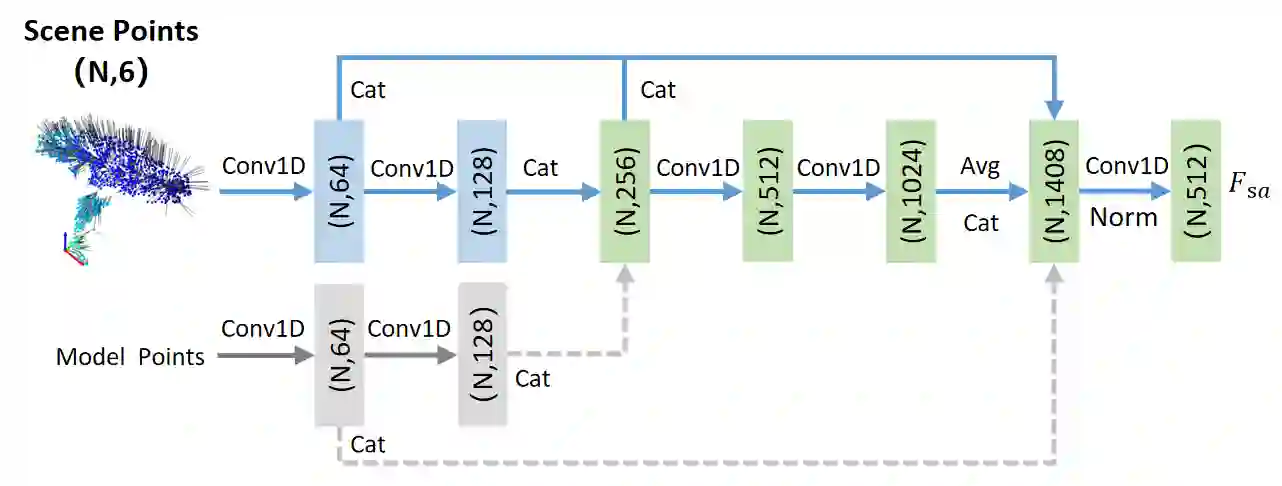
Traditional geometric registration based estimation methods only exploit the CAD model implicitly, which leads to their dependence on observation quality and deficiency to occlusion. To address the problem,the paper proposes a bidirectional correspondence prediction network with a point-wise attention-aware mechanism. This network not only requires the model points to predict the correspondence but also explicitly models the geometric similarities between observations and the model prior. Our key insight is that the correlations between each model point and scene point provide essential information for learning point-pair matches. To further tackle the correlation noises brought by feature distribution divergence, we design a simple but effective pseudo-siamese network to improve feature homogeneity. Experimental results on the public datasets of LineMOD, YCB-Video, and Occ-LineMOD show that the proposed method achieves better performance than other state-of-the-art methods under the same evaluation criteria. Its robustness in estimating poses is greatly improved, especially in an environment with severe occlusions.
翻译:传统的几何配准估计方法仅隐式利用CAD模型,导致其对观测质量存在依赖且在遮挡场景中表现不足。针对该问题,本文提出一种带有逐点注意力感知机制的双向对应关系预测网络。该网络不仅要求模型点预测对应关系,还显式建模观测数据与模型先验之间的几何相似性。我们的核心发现是:每个模型点与场景点之间的相关性为学习点对匹配提供了关键信息。为应对特征分布差异带来的关联噪声,我们设计了一种简单而有效的伪孪生网络以提升特征同质性。在LineMOD、YCB-Video和Occ-LineMOD公开数据集上的实验结果表明,在相同评价标准下,本方法性能优于现有最优方法。特别是在严重遮挡环境中,本方法对姿态估计的鲁棒性得到显著提升。