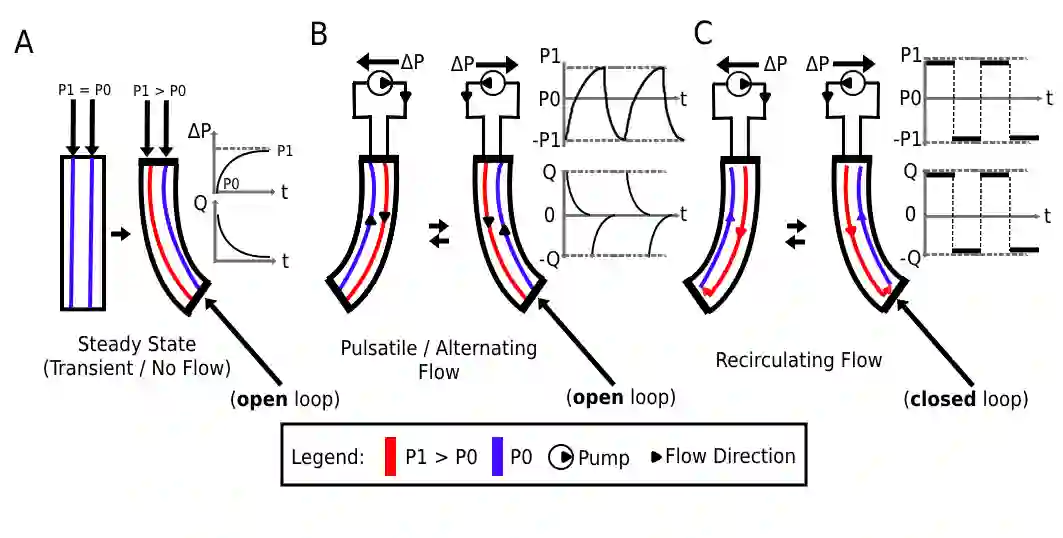
The one-to-one mapping of control inputs to actuator outputs results in elaborate routing architectures that limit how complex fluidic soft robot behaviours can currently become. Embodied intelligence can be used as a tool to counteract this phenomenon. Control functionality can be embedded directly into actuators by leveraging the characteristics of fluid flow phenomena. Whilst prior soft robotics work has focused exclusively on actuators operating in a state of transient/no flow (constant pressure), or pulsatile/alternating flow, our work begins to explore the possibilities granted by operating in the closed-loop flow recirculation regime. Here we introduce the concept of FlowBots: soft robots that utilise the characteristics of continuous fluid flow to enable the embodiment of complex control functionality directly into the structure of the robot. FlowBots have robust, integrated, no-moving-part control systems, and these architectures enable: monolithic additive manufacturing methods, rapid prototyping, greater sustainability, and an expansive range of applications. Based on three FlowBot examples: a bidirectional actuator, a gripper, and a quadruped swimmer - we demonstrate how the characteristics of flow recirculation contribute to simplifications in fluidic analogue control architectures. We conclude by outlining our design and rapid prototyping methodology to empower others in the field to explore this new, emerging design field, and design their own FlowBots.
翻译:控制输入与致动器输出之间的一对一映射导致复杂的路由架构,这限制了当前流体软体机器人行为的复杂程度。具身智能可作为应对这一现象的工具——通过利用流体流动现象的特性,可将控制功能直接嵌入致动器中。以往的软体机器人研究仅关注暂态/无流动(恒定压力)或脉动/交替流动状态下的致动器,而我们的工作则开始探索闭环流动再循环状态下所蕴含的可能性。本文提出FlowBots的概念:一种利用持续流体流动特性将复杂控制功能直接具身化于机器人结构的软体机器人。FlowBots具有鲁棒、集成、无移动部件的控制系统,其架构支持:整体式增材制造方法、快速原型制作、更高的可持续性以及广泛的应用场景。基于双向致动器、抓取器和四足游泳器三种FlowBot实例,我们展示了流动再循环特性如何简化流体模拟控制架构。最后,我们提出设计及快速原型开发方法,旨在助力领域内研究者探索这一新兴设计领域,并设计出各自的FlowBots。