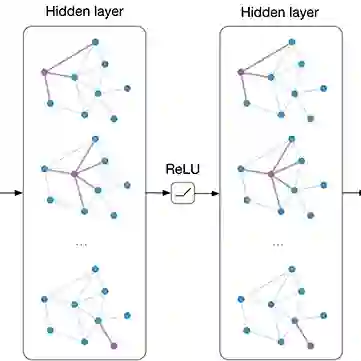
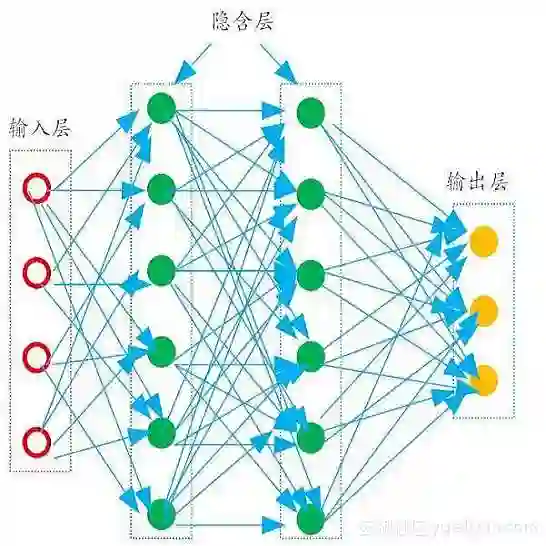
Various hand-designed CNN architectures have been developed, such as VGG, ResNet, DenseNet, etc., and achieve State-of-the-Art (SoTA) levels on different tasks. Neural Architecture Search (NAS) now focuses on automatically finding the best CNN architecture to handle the above tasks. However, the verification of a searched architecture is very time-consuming and makes predictor-based methods become an essential and important branch of NAS. Two commonly used techniques to build predictors are graph-convolution networks (GCN) and multilayer perceptron (MLP). In this paper, we consider the difference between GCN and MLP on adjacent operation trails and then propose the Redirected Adjacent Trails NAS (RATs-NAS) to quickly search for the desired neural network architecture. The RATs-NAS consists of two components: the Redirected Adjacent Trails GCN (RATs-GCN) and the Predictor-based Search Space Sampling (P3S) module. RATs-GCN can change trails and their strengths to search for a better neural network architecture. P3S can rapidly focus on tighter intervals of FLOPs in the search space. Based on our observations on cell-based NAS, we believe that architectures with similar FLOPs will perform similarly. Finally, the RATs-NAS consisting of RATs-GCN and P3S beats WeakNAS, Arch-Graph, and others by a significant margin on three sub-datasets of NASBench-201.
翻译:目前已发展出多种手工设计的CNN架构,如VGG、ResNet、DenseNet等,并在不同任务上达到了最先进水平。神经架构搜索(NAS)目前专注于自动寻找最佳CNN架构以处理上述任务。然而,对搜索得到的架构进行验证非常耗时,这使得基于预测器的方法成为NAS中一个至关重要的分支。构建预测器的两种常用技术是图卷积网络(GCN)和多层感知机(MLP)。本文研究了GCN与MLP在相邻操作路径上的差异,进而提出了重定向相邻路径NAS(RATs-NAS),用于快速搜索所需的神经网络架构。RATs-NAS由两个组件构成:重定向相邻路径图卷积网络(RATs-GCN)和基于预测器的搜索空间采样(P3S)模块。RATs-GCN能够改变路径及其强度以搜索更优的神经网络架构,P3S则可快速聚焦于搜索空间中FLOPs更窄的区间。基于对基于细胞的NAS的观察,我们认为具有相似FLOPs的架构会表现出相似的性能。最终,由RATs-GCN和P3S组成的RATs-NAS在NASBench-201的三个子数据集上以显著优势超越了WeakNAS、Arch-Graph等方法。