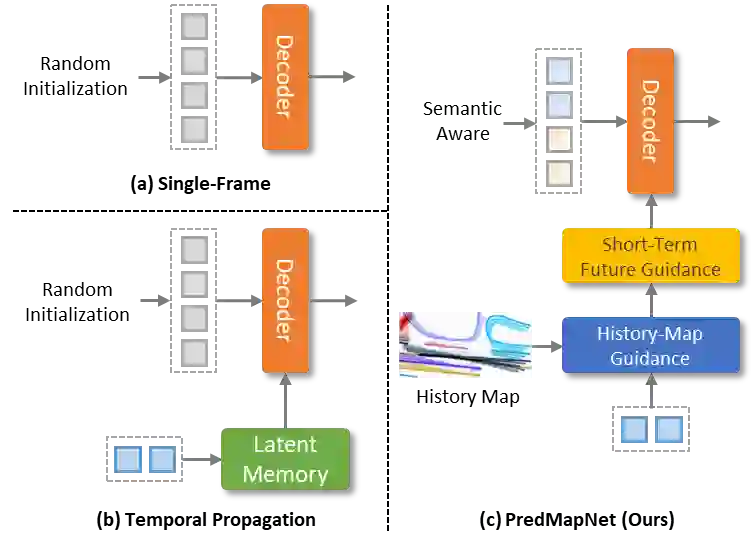
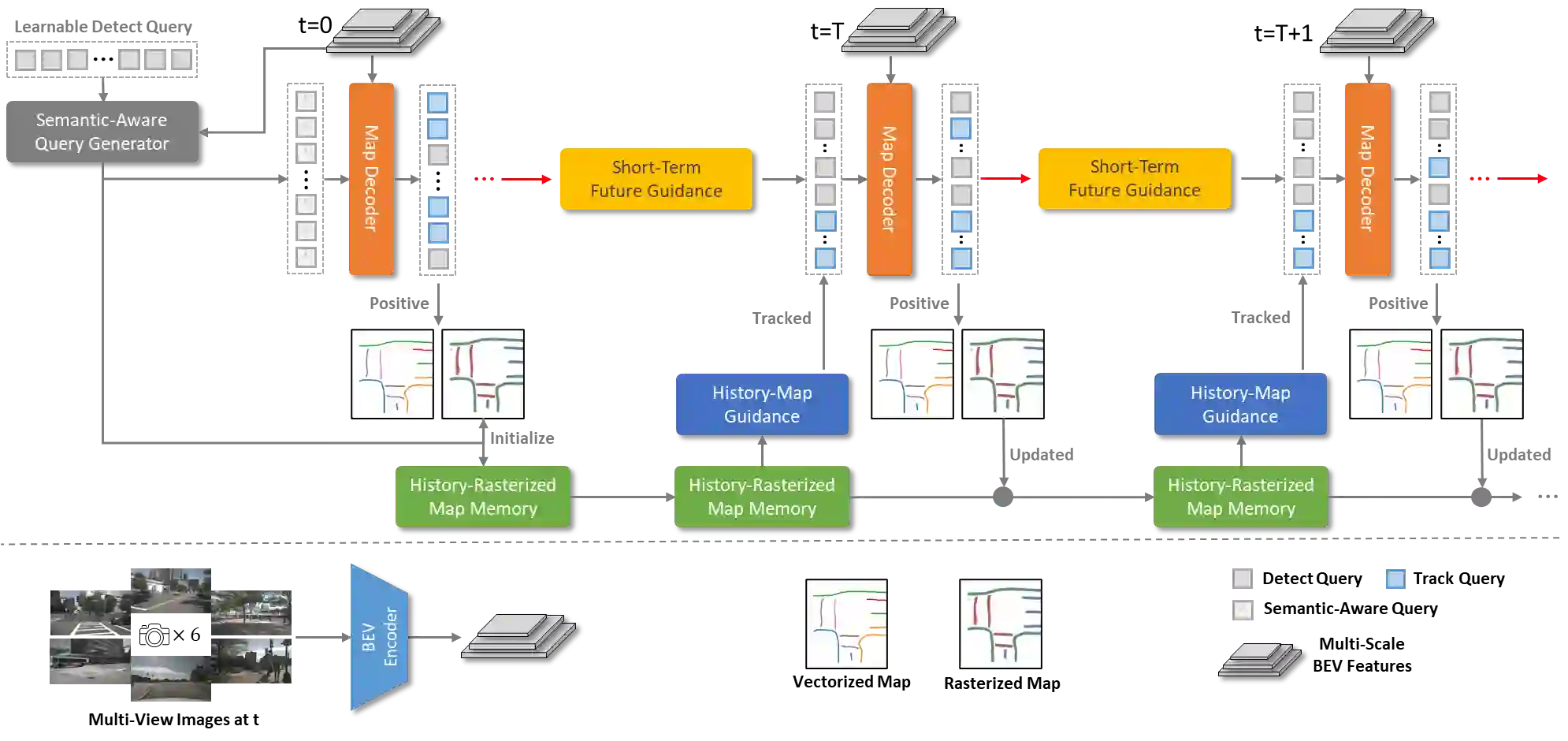
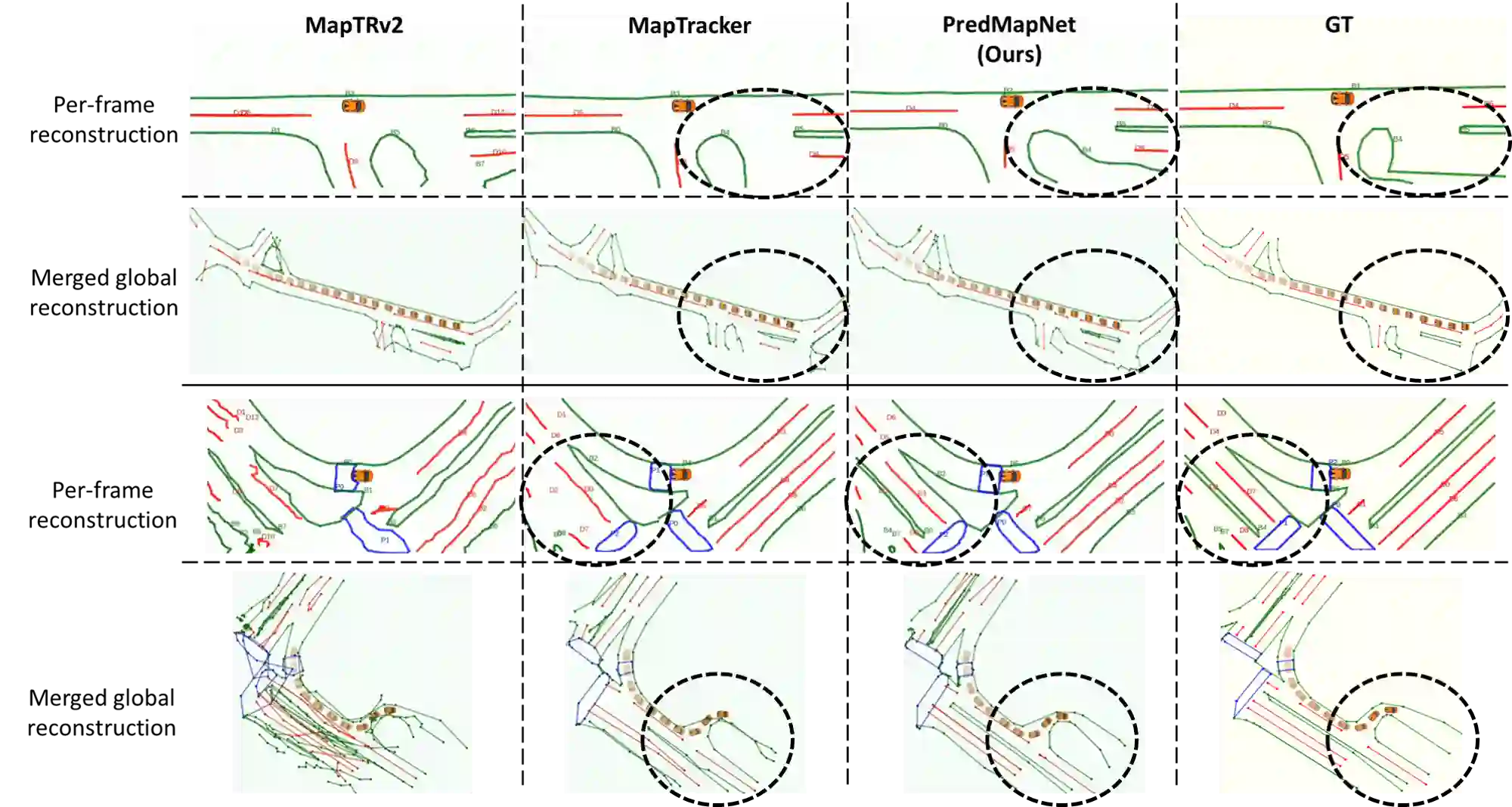
High-definition (HD) maps are crucial to autonomous driving, providing structured representations of road elements to support navigation and planning. However, existing query-based methods often employ random query initialization and depend on implicit temporal modeling, which lead to temporal inconsistencies and instabilities during the construction of a global map. To overcome these challenges, we introduce a novel end-to-end framework for consistent online HD vectorized map construction, which jointly performs map instance tracking and short-term prediction. First, we propose a Semantic-Aware Query Generator that initializes queries with spatially aligned semantic masks to capture scene-level context globally. Next, we design a History Rasterized Map Memory to store fine-grained instance-level maps for each tracked instance, enabling explicit historical priors. A History-Map Guidance Module then integrates rasterized map information into track queries, improving temporal continuity. Finally, we propose a Short-Term Future Guidance module to forecast the immediate motion of map instances based on the stored history trajectories. These predicted future locations serve as hints for tracked instances to further avoid implausible predictions and keep temporal consistency. Extensive experiments on the nuScenes and Argoverse2 datasets demonstrate that our proposed method outperforms state-of-the-art (SOTA) methods with good efficiency.
翻译:高精(HD)地图对自动驾驶至关重要,其提供的道路元素结构化表征可支持导航与规划。然而,现有基于查询的方法通常采用随机查询初始化并依赖隐式时序建模,导致在构建全局地图时出现时序不一致与不稳定的问题。为克服这些挑战,本文提出一种新颖的端到端框架,用于实现一致的在线高精矢量地图构建,该框架联合执行地图实例跟踪与短期预测。首先,我们提出一种语义感知查询生成器,通过空间对齐的语义掩码初始化查询,以全局捕获场景级上下文。接着,我们设计了一种历史栅格化地图记忆模块,用于存储每个被跟踪实例的细粒度实例级地图,从而提供显式的历史先验。随后,历史地图引导模块将栅格化地图信息整合至跟踪查询中,以提升时序连续性。最后,我们提出短期未来引导模块,基于存储的历史轨迹预测地图实例的即时运动。这些预测的未来位置作为跟踪实例的提示信息,进一步避免不合理预测并保持时序一致性。在 nuScenes 和 Argoverse2 数据集上的大量实验表明,本文所提方法在保证良好效率的同时,性能优于现有最优(SOTA)方法。