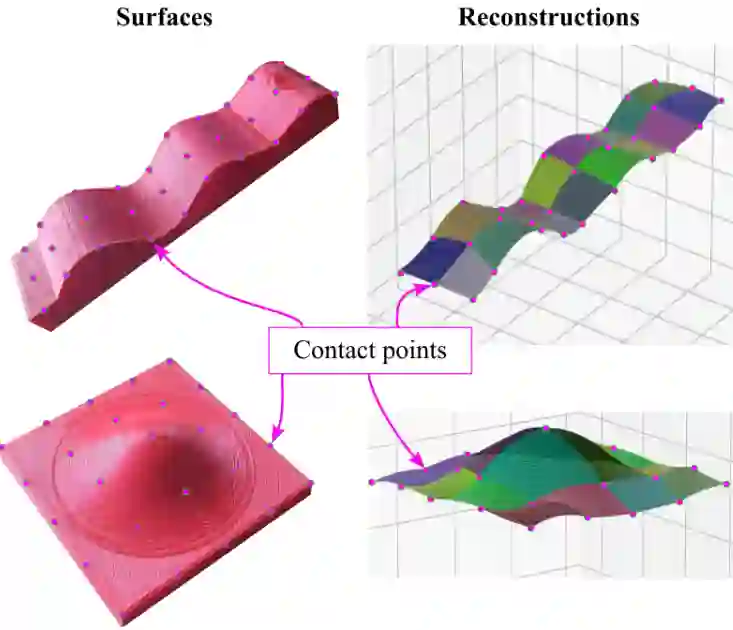
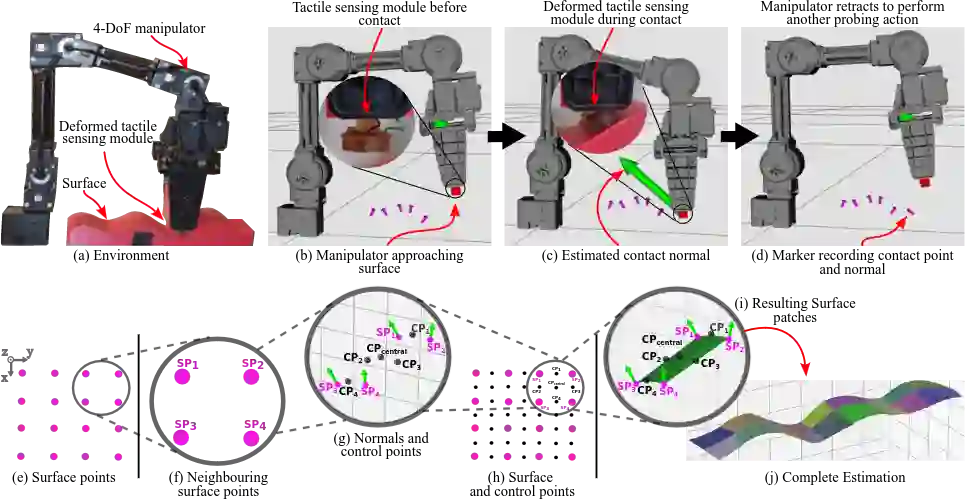
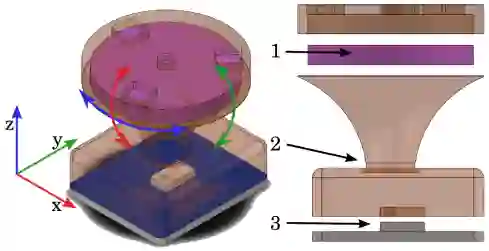
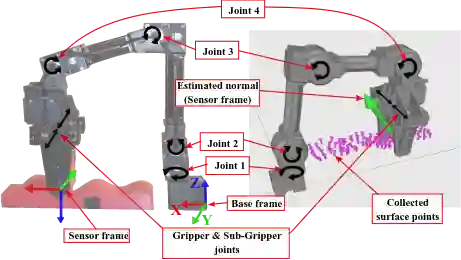
Non-flat surfaces pose difficulties for robots operating in unstructured environments. Reconstructions of uneven surfaces may only be partially possible due to non-compliant end-effectors and limitations on vision systems such as transparency, reflections, and occlusions. This study achieves blind surface reconstruction by harnessing the robotic manipulator's kinematic data and a compliant tactile sensing module, which incorporates inertial, magnetic, and pressure sensors. The module's flexibility enables us to estimate contact positions and surface normals by analyzing its deformation during interactions with unknown objects. While previous works collect only positional information, we include the local normals in a geometrical approach to estimate curvatures between adjacent contact points. These parameters then guide a spline-based patch generation, which allows us to recreate larger surfaces without an increase in complexity while reducing the time-consuming step of probing the surface. Experimental validation demonstrates that this approach outperforms an off-the-shelf vision system in estimation accuracy. Moreover, this compliant haptic method works effectively even when the manipulator's approach angle is not aligned with the surface normals, which is ideal for unknown non-flat surfaces.
翻译:非平坦表面给在非结构化环境中运行的机器人带来挑战。由于非顺应性末端执行器以及视觉系统的局限性(如透明、反射和遮挡),不平整表面的重建可能仅能部分实现。本研究通过利用机器人操作臂的运动学数据与顺应性触觉传感模块(集成惯性、磁性与压力传感器)实现了盲表面重建。该模块的柔顺性使我们能够通过分析其与未知物体交互时的形变来估计接触位置和表面法向量。与以往仅采集位置信息的研究不同,我们将局部法向量纳入几何方法中,用于估算相邻接触点之间的曲率。这些参数进而指导基于样条的曲面块生成,从而在不增加复杂度的情况下重建更大表面,同时减少耗时探测步骤。实验验证表明,该方法在估计精度上优于现成视觉系统。此外,即使操作臂的接近角度与表面法向量不一致时,该顺应性触觉方法仍能有效工作,这非常适合未知非平坦表面。