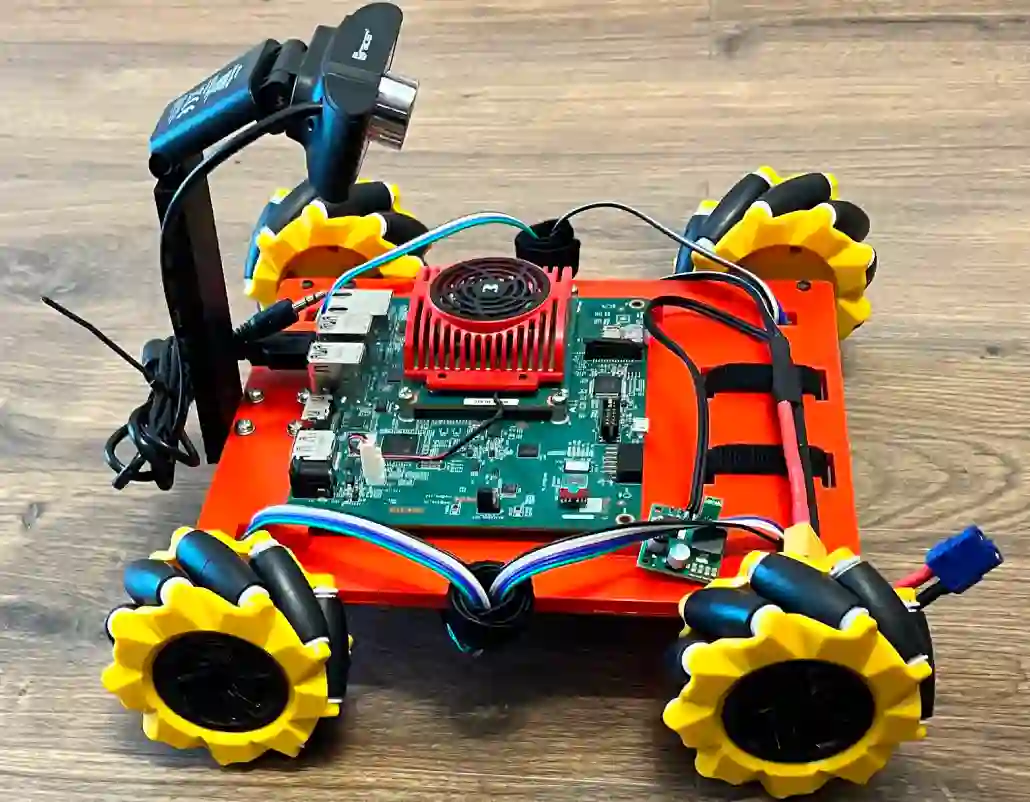
Perception and control systems for autonomous vehicles are an active area of scientific and industrial research. These solutions should be characterised by high efficiency in recognising obstacles and other environmental elements in different road conditions, real-time capability, and energy efficiency. Achieving such functionality requires an appropriate algorithm and a suitable computing platform. In this paper, we have used the MultiTaskV3 detection-segmentation network as the basis for a perception system that can perform both functionalities within a single architecture. It was appropriately trained, quantised, and implemented on the AMD Xilinx Kria KV260 Vision AI embedded platform. By using this device, it was possible to parallelise and accelerate the computations. Furthermore, the whole system consumes relatively little power compared to a CPU-based implementation (an average of 5 watts, compared to the minimum of 55 watts for weaker CPUs, and the small size (119mm x 140mm x 36mm) of the platform allows it to be used in devices where the amount of space available is limited. It also achieves an accuracy higher than 97% of the mAP (mean average precision) for object detection and above 90% of the mIoU (mean intersection over union) for image segmentation. The article also details the design of the Mecanum wheel vehicle, which was used to test the proposed solution in a mock-up city.
翻译:自动驾驶车辆感知与控制系统是科学和工业研究中的活跃领域。此类解决方案需具备以下特性:在不同道路条件下高效识别障碍物及其他环境要素的能力、实时处理能力以及能源效率。实现上述功能需要合适的算法和计算平台。本文采用MultiTaskV3检测-分割网络作为感知系统的基础,该网络可在单一架构中同时实现两种功能。我们对网络进行了适当训练、量化处理,并在AMD Xilinx Kria KV260 Vision AI嵌入式平台上实现。通过使用该设备,我们实现了计算的并行化与加速。此外,与基于CPU的实现方案相比,整个系统功耗较低(平均5瓦,而最低功耗的CPU至少为55瓦),且平台小巧的尺寸(119mm x 140mm x 36mm)使其可应用于空间受限的设备。系统在目标检测方面实现了超过97%的mAP(平均精度均值)准确率,在图像分割方面实现了超过90%的mIoU(平均交并比)。本文还详细介绍了用于在模拟城市环境中测试所提方案的麦克纳姆轮车辆设计。