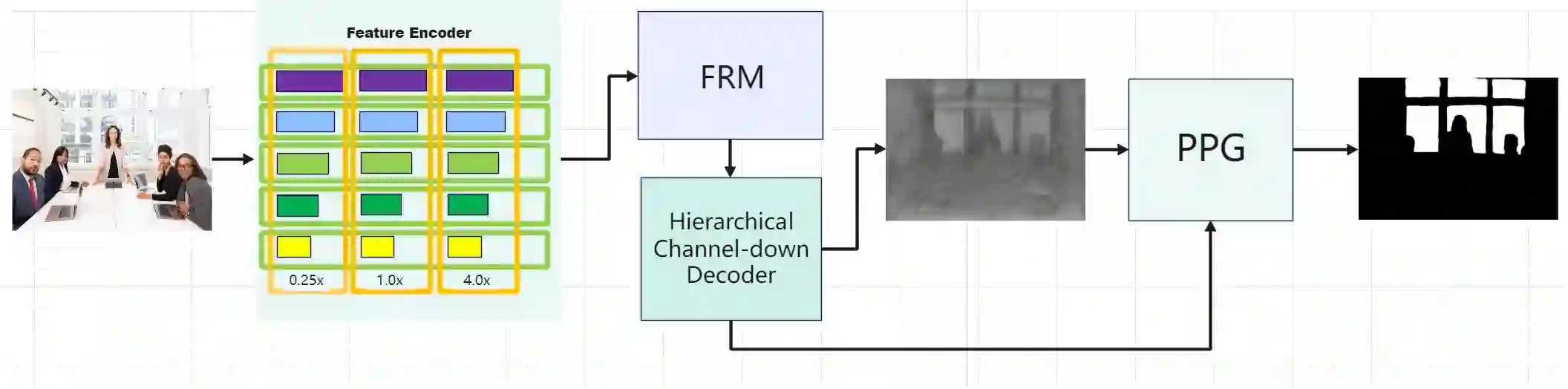
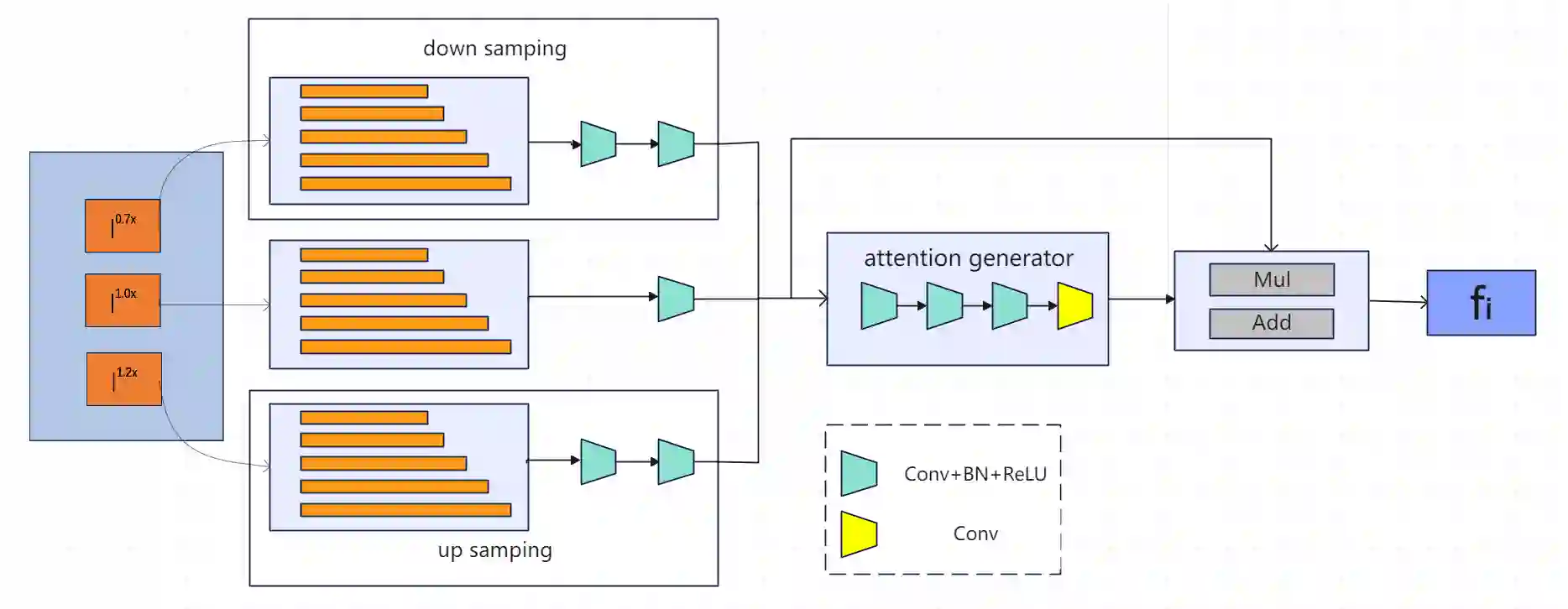
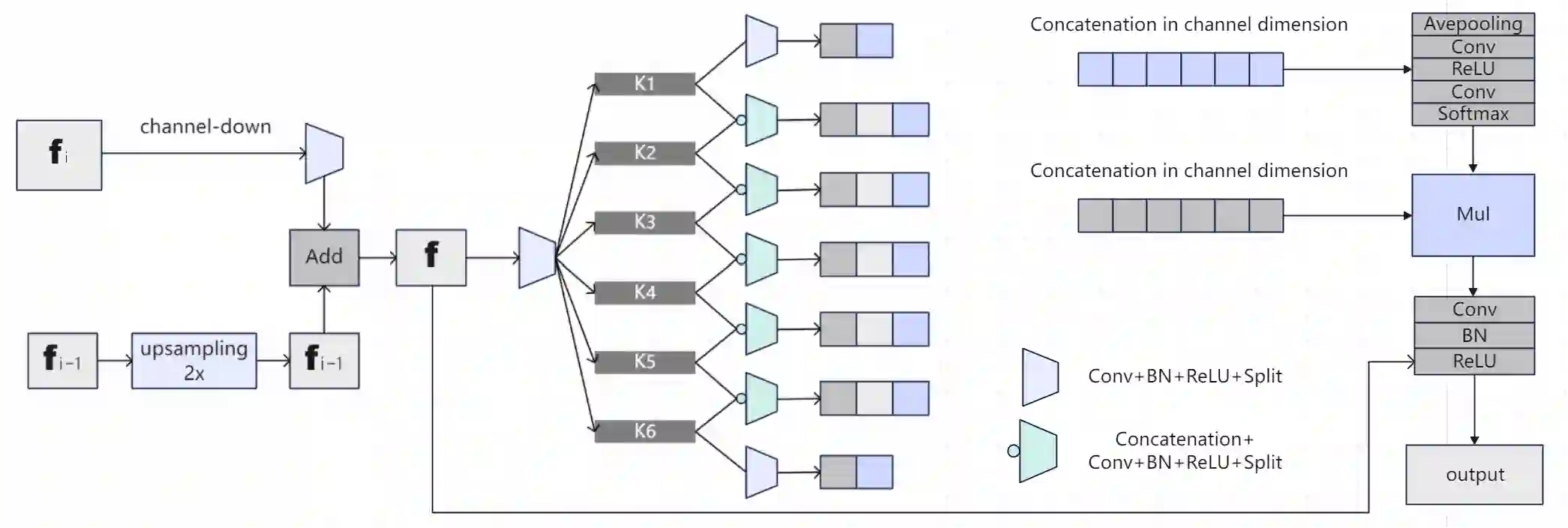
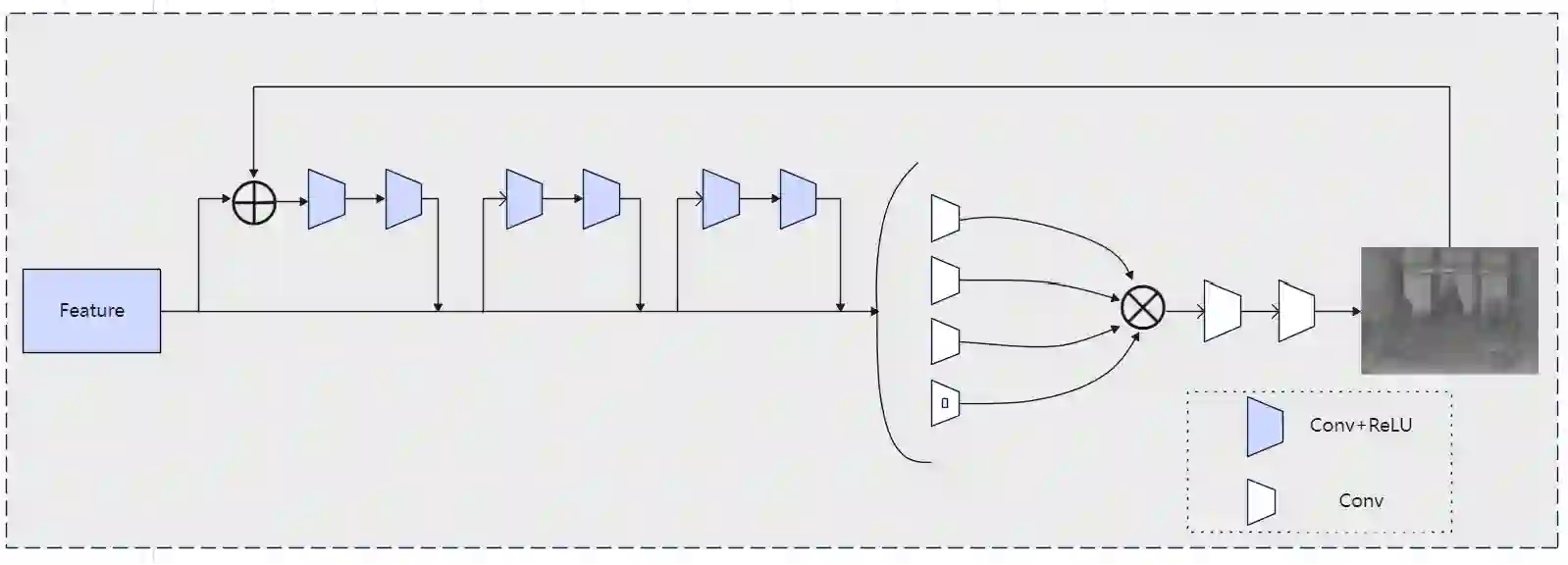
Glass-like objects can be seen everywhere in our daily life which are very hard for existing methods to segment them. The properties of transparencies pose great challenges of detecting them from the chaotic background and the vague separation boundaries further impede the acquisition of their exact contours. Moving machines which ignore glasses have great risks of crashing into transparent barriers or difficulties in analysing objects reflected in the mirror, thus it is of substantial significance to accurately locate glass-like objects and completely figure out their contours. In this paper, inspired by the scale integration strategy and the refinement method, we proposed a brand-new network, named as MGNet, which consists of a Fine-Rescaling and Merging module (FRM) to improve the ability to extract spatially relationship and a Primary Prediction Guiding module (PPG) to better mine the leftover semantics from the fused features. Moreover, we supervise the model with a novel loss function with the uncertainty-aware loss to produce high-confidence segmentation maps. Unlike the existing glass segmentation models that must be trained on different settings with respect to varied datasets, our model are trained under consistent settings and has achieved superior performance on three popular public datasets. Code is available at
翻译:日常生活中,玻璃类物体随处可见,但现有方法很难对其进行分割。透明性特性使得从混乱背景中检测玻璃物体面临巨大挑战,而模糊的分界边缘进一步阻碍了其精确轮廓的获取。忽视玻璃的移动机器人在撞击透明屏障时存在巨大风险,或难以分析镜面反射的物体,因此精确定位玻璃类物体并完整描绘其轮廓具有重要实际意义。受尺度整合策略与细化方法的启发,本文提出全新网络MGNet,包含精细缩放融合模块(FRM)以增强空间关系提取能力,以及主预测引导模块(PPG)以更好地挖掘融合特征中的残留语义。此外,我们采用基于不确定性感知损失的新型损失函数监督模型,生成高置信度分割图。与现有玻璃分割模型需针对不同数据集设置不同训练参数不同,本模型在统一训练设置下,已在三个主流公开数据集上取得优越性能。代码已开源。