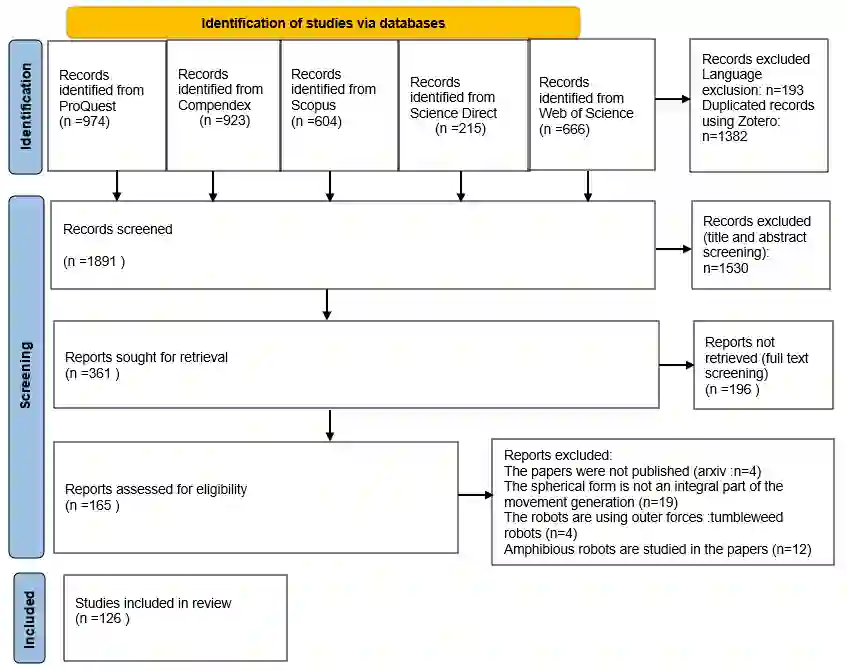
Spherical robots have garnered increasing interest for their applications in exploration, tunnel inspection, and extraterrestrial missions. Diverse designs have emerged, including barycentric configurations, pendulum-based mechanisms, etc. In addition, a wide spectrum of control strategies has been proposed, ranging from traditional PID approaches to cutting-edge neural networks. Our systematic review aims to comprehensively identify and categorize locomotion systems and control schemes employed by spherical robots, spanning the years 1996 to 2023. A meticulous search across five databases yielded a dataset of 3189 records. As a result of our exhaustive analysis, we identified a collection of novel designs and control strategies. Leveraging the insights garnered, we provide valuable recommendations for optimizing the design and control aspects of spherical robots, supporting both novel design endeavors and the advancement of field deployments. Furthermore, we illuminate key research directions that hold the potential to unlock the full capabilities of spherical robots
翻译:球形机器人因在探测、隧道检测及地外任务中的应用而日益受到关注。多样化的设计方案相继涌现,包括重心配置结构、基于摆锤的机构等。此外,从传统PID方法到前沿神经网络,控制策略已形成广泛范畴。本系统综述旨在全面识别并分类1996年至2023年间球形机器人所采用的 locomotion 系统与控制方案。通过对五大数据库的精细检索,我们获得了包含3189条记录的数据集。基于深入分析,我们识别出一系列新颖的设计方案与控制策略。借助获得的洞见,我们为优化球形机器人的设计与控制提供了宝贵建议,以支持新型设计探索及实地部署的推进。此外,我们阐明了有望释放球形机器人全部潜力的关键研究方向。