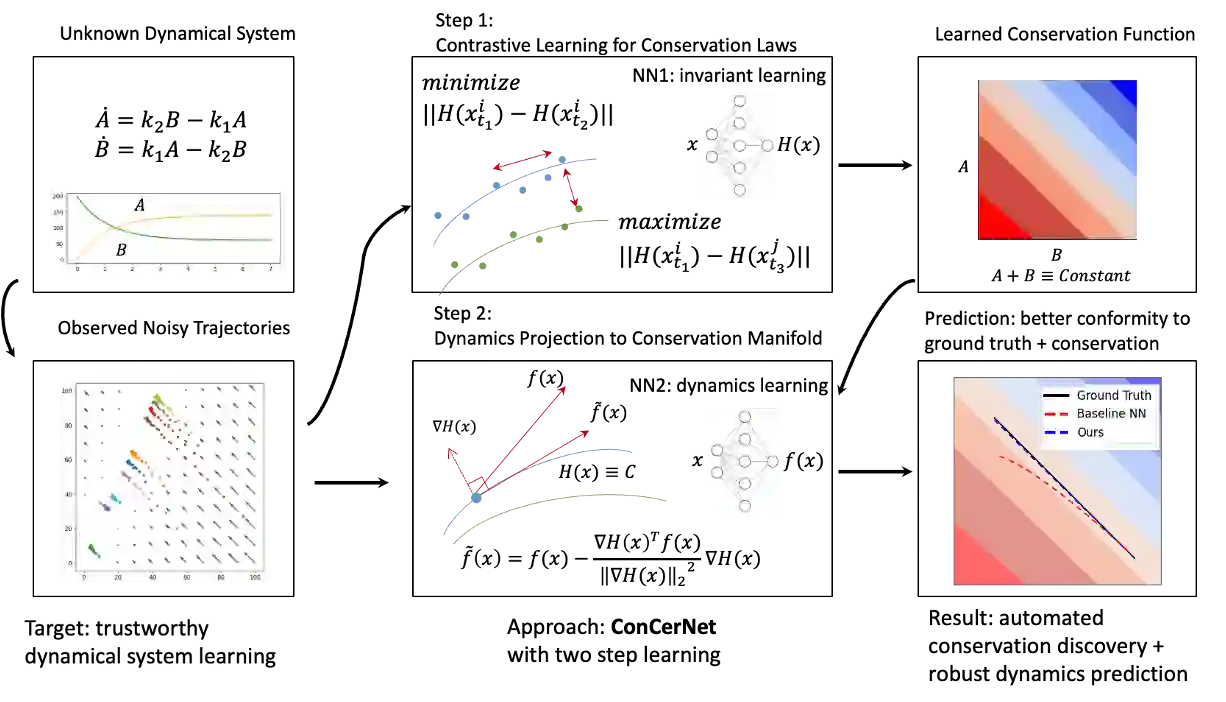
Deep neural networks (DNN) have shown great capacity of modeling a dynamical system; nevertheless, they usually do not obey physics constraints such as conservation laws. This paper proposes a new learning framework named ConCerNet to improve the trustworthiness of the DNN based dynamics modeling to endow the invariant properties. ConCerNet consists of two steps: (i) a contrastive learning method to automatically capture the system invariants (i.e. conservation properties) along the trajectory observations; (ii) a neural projection layer to guarantee that the learned dynamics models preserve the learned invariants. We theoretically prove the functional relationship between the learned latent representation and the unknown system invariant function. Experiments show that our method consistently outperforms the baseline neural networks in both coordinate error and conservation metrics by a large margin. With neural network based parameterization and no dependence on prior knowledge, our method can be extended to complex and large-scale dynamics by leveraging an autoencoder.
翻译:深度神经网络在建模动力系统方面展现出强大能力,但通常不遵循守恒律等物理约束。本文提出名为ConCerNet的新型学习框架,旨在提升基于深度神经网络动力学建模的可信度,赋予其不变性特征。ConCerNet包含两个步骤:(i) 通过对比学习方法沿轨迹观测自动捕捉系统不变量(即守恒性质);(ii) 设计神经投影层确保学习到的动力学模型保持已捕获的不变量。我们从理论上证明了所学潜在表示与未知系统不变函数之间的函数关系。实验表明,本方法在坐标误差与守恒指标上均显著优于基准神经网络。基于神经网络参数化且不依赖先验知识,本方法可通过自编码器扩展至复杂大规模动力系统。