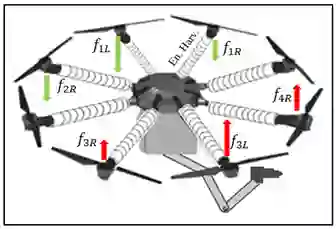
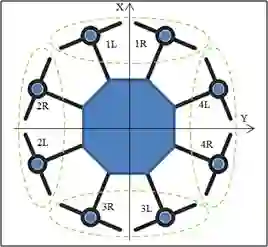
"Smart cities" is the trendy rubric of modern urban projects that require new innovative ideas to attain the desired perfection in many fields to change our life for the better. In this context, a new innovative application will be presented here to investigate and continuously make the required maintenance of public roads by creating a flying robot for painting the partially erased parts of sidewalks' edges that are usually plated in two different colors; primarily black and white as we suppose here. The first contribution of this paper is developing a fuzzy-logic-based stabilization system for an octocopter serving as a liquids transporter that could be equipped with a robot arm. The second contribution consists of designing an embedded energy harvester for the flying robot to promote the management of available power sources. Finally, as suggested in this project, we present a complement heuristic study clarifying some main concepts that rely on a computer vision-based decision-making system.
翻译:"智慧城市"是现代城市项目中的热门概念,需要通过创新理念在众多领域实现理想化目标,从而改善人类生活品质。本文在此背景下提出一种新型创新应用:通过构建可喷涂人行道边缘半褪色区域的飞行机器人,对通常采用黑白色调相间铺设的公共道路进行持续巡检与维护。本文的首要贡献在于开发了基于模糊逻辑的八旋翼无人机稳定系统,该无人机可作为液体运输载体并配备机械臂。第二个贡献是为该飞行机器人设计嵌入式能量收集装置,以优化多能源管理方案。最后,本项目提出一项补充性启发研究,阐释了基于计算机视觉决策系统的核心概念框架。