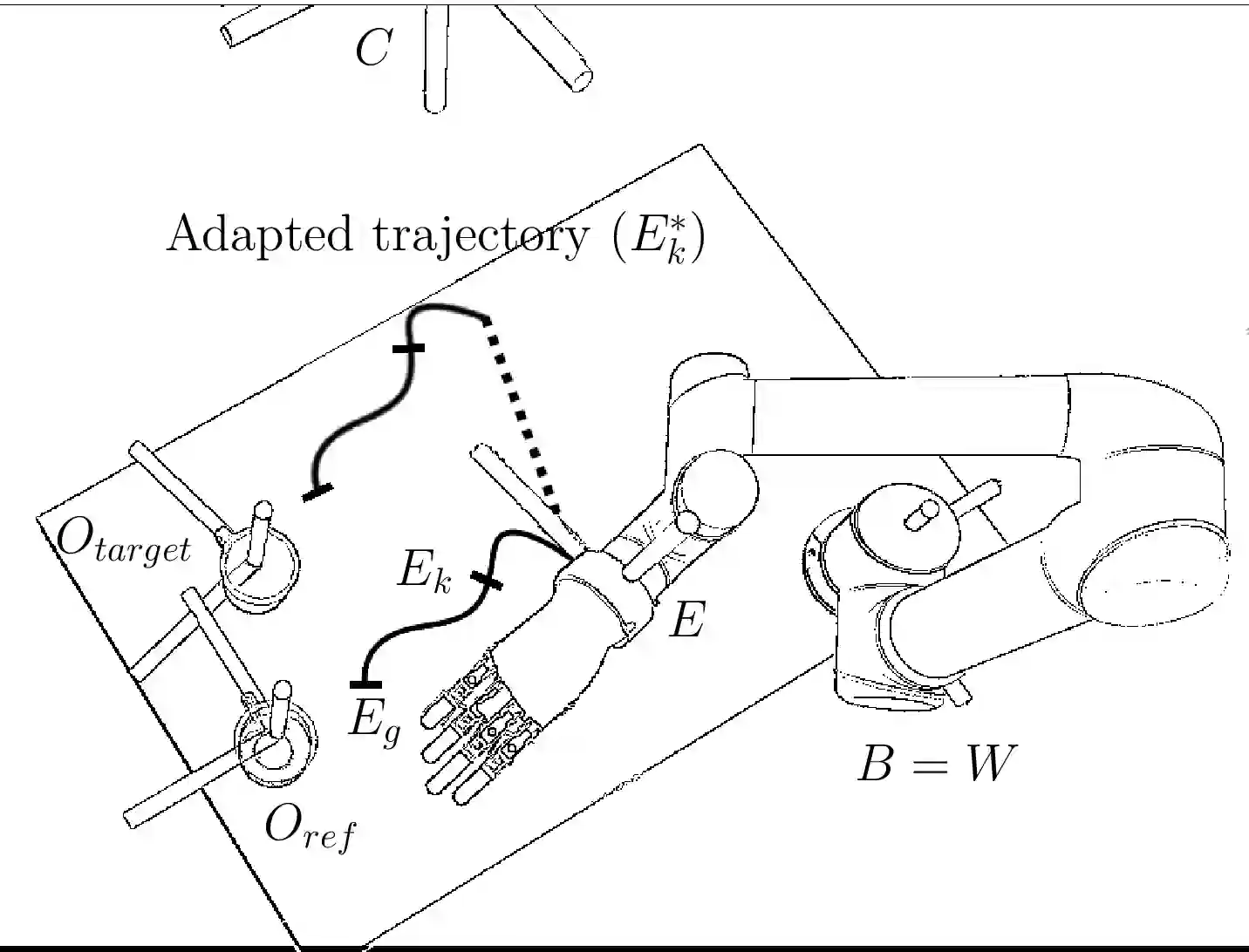
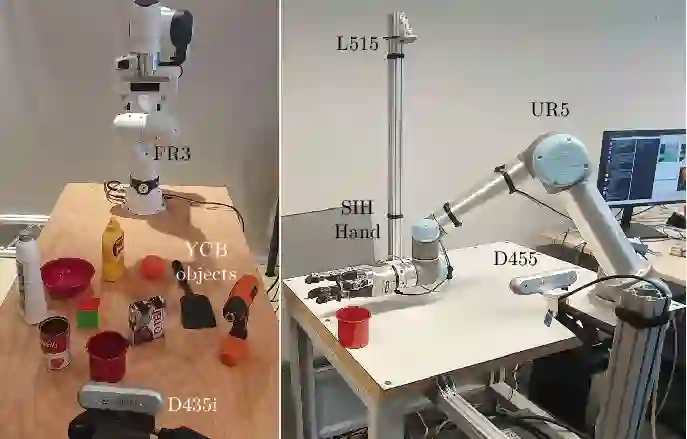
Robotic grasping is still a partially solved, multidisciplinary problem where data-driven techniques play an increasing role. The sparse nature of rewards make the automatic generation of grasping datasets challenging, especially for unconventional morphologies or highly actuated end-effectors. Most approaches for obtaining large-scale datasets rely on numerous human-provided demonstrations or heavily engineered solutions that do not scale well. Recent advances in Quality-Diversity (QD) methods have investigated how to learn object grasping at a specific pose with different robot morphologies. The present work introduces a pipeline for adapting QD-generated trajectories to new object poses. Using an RGB-D data stream, the vision pipeline first detects the targeted object, predicts its 6-DOF pose, and finally tracks it. An automatically generated reach-and-grasp trajectory can then be adapted by projecting it relatively to the object frame. Hundreds of trajectories have been deployed into the real world on several objects and with different robotic setups: a Franka Research 3 with a parallel gripper and a UR5 with a dexterous SIH Schunk hand. The transfer ratio obtained when applying transformation to the object pose matches the one obtained when the object pose matches the simulation, demonstrating the efficiency of the proposed approach.
翻译:机器人抓取仍是一个部分解决的多学科问题,数据驱动技术在其中发挥着越来越重要的作用。奖励的稀疏性使得自动生成抓取数据集颇具挑战性,尤其是对于非常规形态或高度驱动的末端执行器。目前获取大规模数据集的大多数方法依赖于大量人工演示或扩展性欠佳的复杂工程解决方案。质量-多样性(QD)方法的最新进展已探索了如何在不同机器人形态下学习特定姿态的物体抓取。本研究提出了一种将QD生成轨迹适配至新物体姿态的流水线。该视觉流水线通过RGB-D数据流首先检测目标物体,预测其六自由度姿态,并最终对其进行跟踪。通过相对于物体坐标系进行投影,可自适应调整自动生成的可达-抓取轨迹。我们在真实世界中针对多种物体及不同机器人配置(配备平行夹爪的Franka Research 3与配备灵巧SIH Schunk手的UR5)部署了数百条轨迹。当对物体姿态施加变换时获得的迁移成功率与物体姿态与仿真匹配时获得的成功率相当,证实了所提方法的有效性。