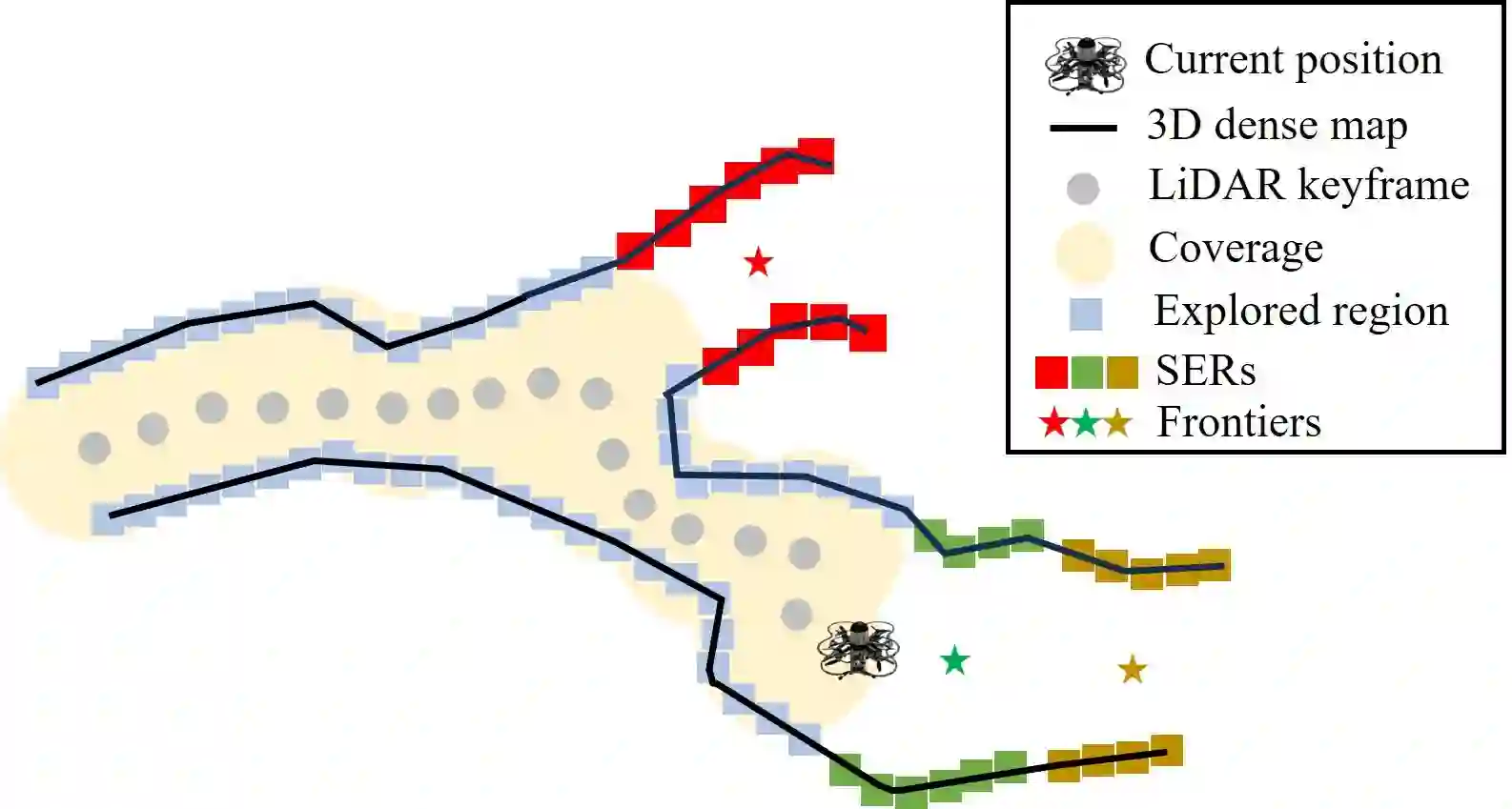
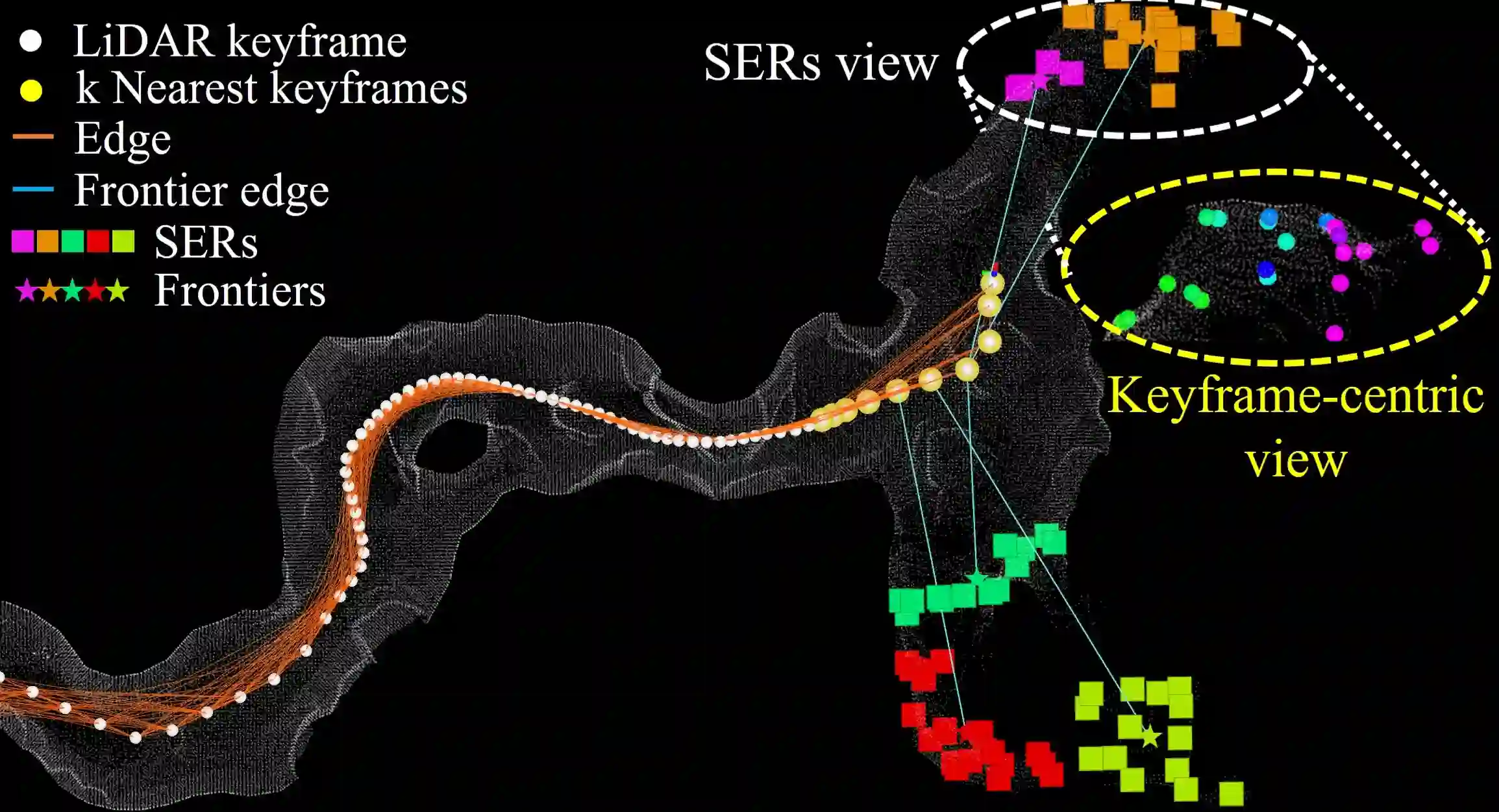
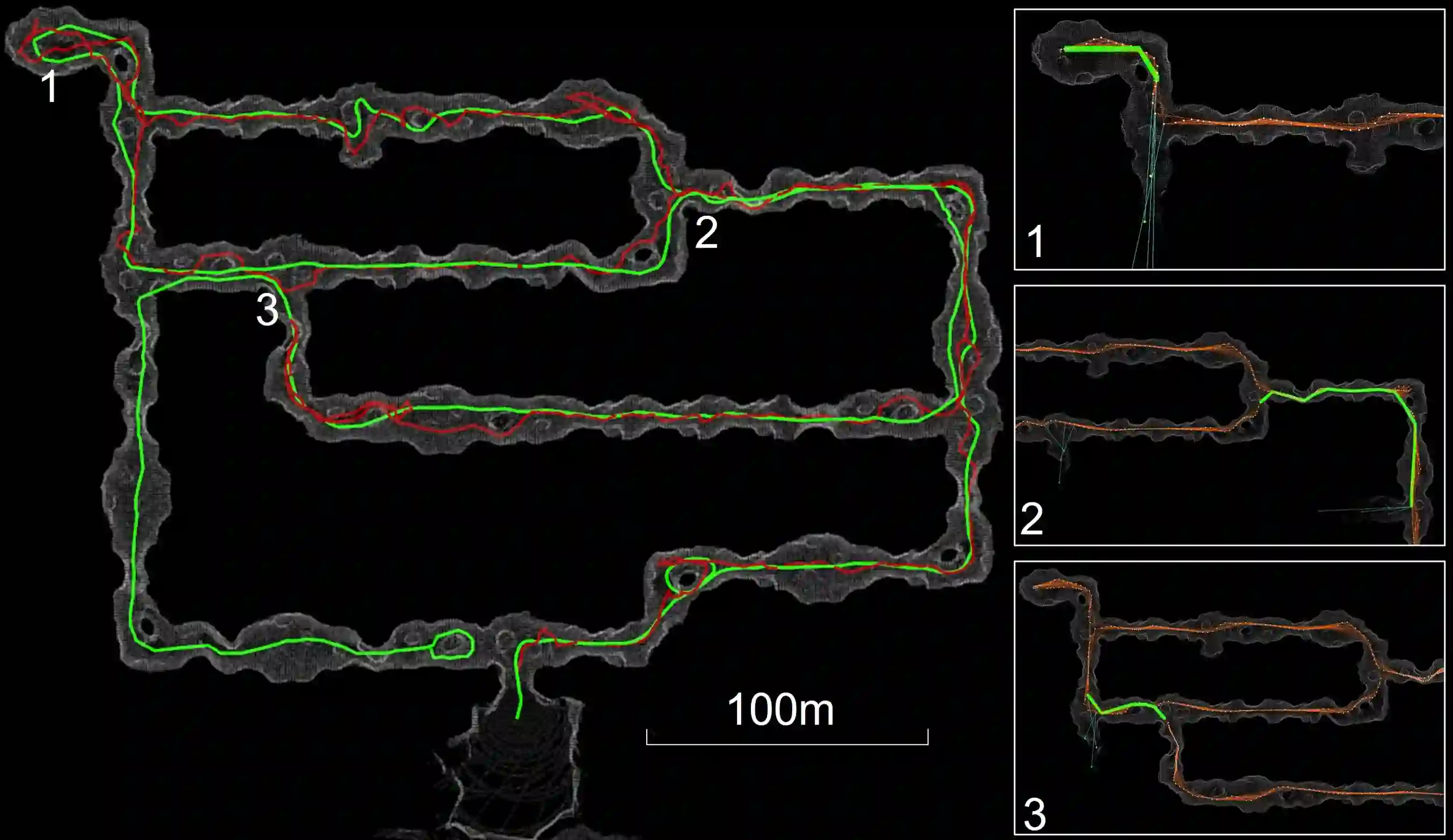
Existing exploration algorithms mainly generate frontiers using random sampling or motion primitive methods within a specific sensor range or search space. However, frontiers generated within constrained spaces lead to back-and-forth maneuvers in large-scale environments, thereby diminishing exploration efficiency. To address this issue, we propose a method that utilizes a 3D dense map to generate Segmented Exploration Regions (SERs) and generate frontiers from a global-scale perspective. In particular, this paper presents a novel topological map generation approach that fully utilizes Line-of-Sight (LOS) features of LiDAR sensor points to enhance exploration efficiency inside large-scale subterranean environments. Our topological map contains the contributions of keyframes that generate each SER, enabling rapid exploration through a switch between local path planning and global path planning to each frontier. The proposed method achieved higher explored volume generation than the state-of-the-art algorithm in a large-scale simulation environment and demonstrated a 62% improvement in explored volume increment performance. For validation, we conducted field tests using UAVs in real subterranean environments, demonstrating the efficiency and speed of our method.
翻译:现有探索算法主要通过特定传感器范围或搜索空间内的随机采样或运动基元方法生成前沿。然而,在受限空间内生成的前沿会导致大规模环境中的往返机动,从而降低探索效率。为解决这一问题,我们提出了一种利用三维稠密地图生成分段探索区域(SERs)并从全局尺度视角生成前沿的方法。具体而言,本文提出了一种新颖的拓扑地图生成方法,该方法充分利用LiDAR传感器点的视线(LOS)特征,以提升大规模地下环境中的探索效率。我们的拓扑地图包含生成每个SER的关键帧贡献,通过在各前沿的局部路径规划与全局路径规划之间切换,实现快速探索。所提方法在大规模仿真环境中实现了比现有最优算法更高的探索体积生成量,并在探索体积增量性能上展示了62%的提升。为验证效果,我们使用无人机在真实地下环境中进行了现场测试,证明了我们方法的效率与速度。