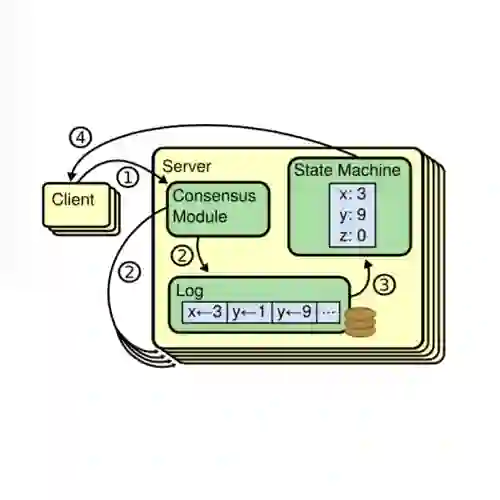
We propose a methodology for connected autonomous vehicles (CAVs) to determine their passing priority at unsignalized intersections where they coexist with human-driven vehicles (HVs). Assuming that CAVs can perceive the entry order of surrounding vehicles using computer vision technology and are capable of avoiding collisions, we introduce a voting-based distributed consensus algorithm inspired by Raft to resolve tie-breaking among simultaneously arriving CAVs. The algorithm is structured around the candidate and leader election processes and incorporates a minimal consensus quorum to ensure both safety and liveness among CAVs under typical asynchronous communication conditions. Assuming CAVs to be SAE (Society of Automotive Engineers) Level-4 or higher autonomous vehicles, we implemented the proposed distributed consensus algorithm using gRPC. By adjusting variables such as the CAV-to-HV ratio, intersection scale, and the processing time of computer vision modules, we demonstrated that stable consensus can be achieved even under mixed-traffic conditions involving HVs without adequate functionalities to interact with CAVs. Experimental results show that the proposed algorithm reached consensus at a typical unsignalized four-way, two-lane intersection in approximately 30-40 ms on average. A secondary vision-based system is employed to complete the crossing priorities based on the recognized lexicographical order of the license plate numbers in case the consensus procedure times out on an unreliable vehicle-to-vehicle communication network. The significance of this study lies in its ability to improve traffic flow at unsignalized intersections by enabling rapid determination of passing priority through distributed consensus even under mixed traffic with faulty vehicles.
翻译:我们提出了一种方法,使网联自主车辆(CAVs)能够在与人类驾驶车辆(HVs)共存的非信号交叉口确定其通行优先级。假设CAVs能够利用计算机视觉技术感知周围车辆进入交叉口的顺序,并具备避撞能力,我们引入了一种基于投票的分布式共识算法(灵感来源于Raft算法),以解决同时到达的CAVs之间的竞争问题。该算法围绕候选者和领导者选举过程构建,并纳入最小共识法定人数,以确保在典型异步通信条件下CAVs的安全性和活跃性。假设CAVs达到SAE(国际自动机工程师学会)L4级或更高级别的自动驾驶水平,我们使用gRPC实现了所提出的分布式共识算法。通过调整CAV与HV比例、交叉口规模以及计算机视觉模块处理时间等变量,我们证明了即使在涉及无法与CAVs进行充分交互的HVs的混合交通条件下,也能实现稳定的共识。实验结果显示,在典型的无信号四向双车道交叉口,所提算法平均在约30-40毫秒内达成共识。当车辆间通信网络不可靠导致共识过程超时时,采用了基于视觉的二次系统,根据识别到的车牌号字典序来确定通行优先级。本研究的意义在于,即使在存在故障车辆的混合交通中,也能通过分布式共识快速确定通行优先级,从而改善无信号交叉口的交通流。