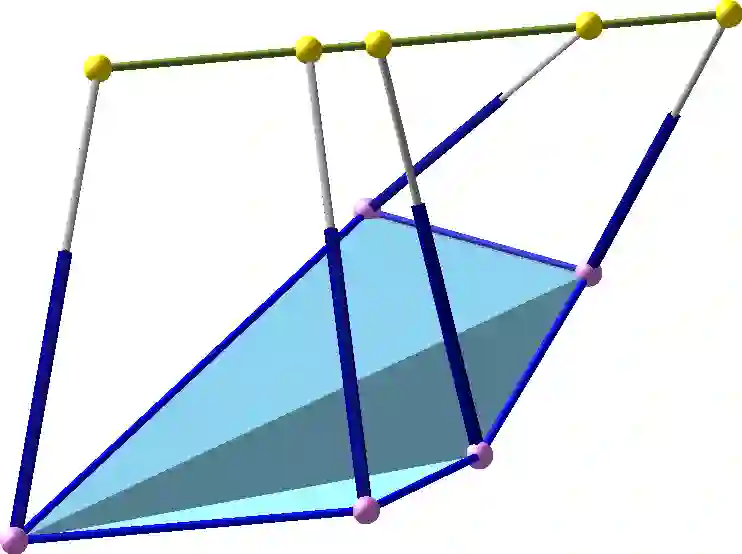
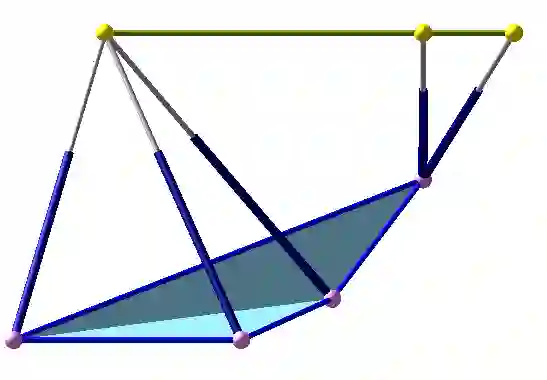
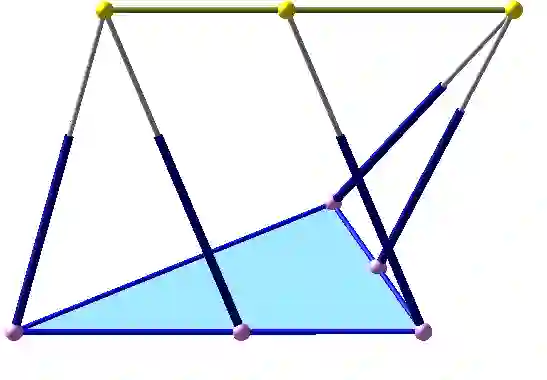
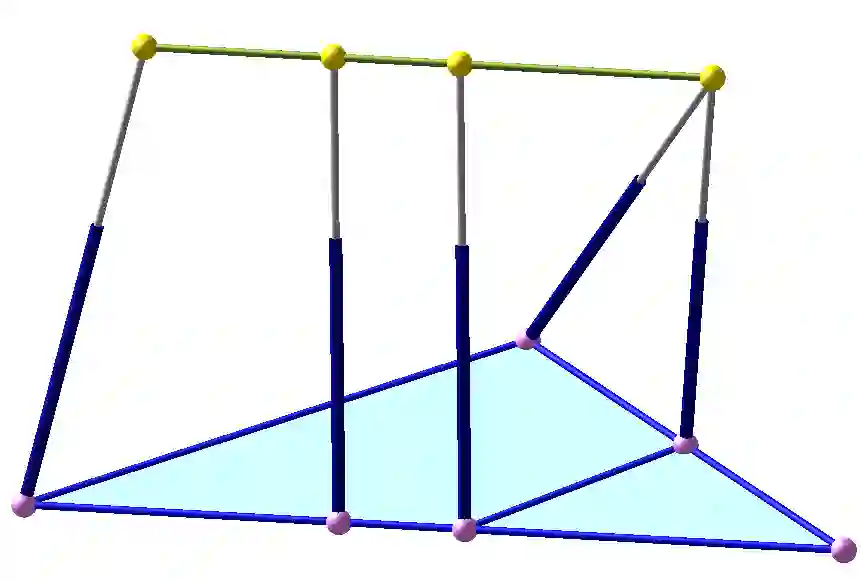
The kinematic/robotic community is not only interested in measuring the closeness of a given robot configuration to its next singular one but also in a geometric meaningful index evaluating how far the robot design is away from being architecturally singular. Such an architecture singularity distance, which can be used by engineers as a criterion within the design process, is presented for a certain class of parallel manipulators of Stewart-Gough type; namely so-called linear pentapods. Geometrically the architecture singular designs are well-understood and can be subclassified into several cases, which allows to solve the optimization problem of computing the closest architecture singular design to a given linear pentapod with algorithms from numerical algebraic geometry.
翻译:运动学/机器人学界不仅关注量化给定机器人配置与邻近奇异配置之间的接近程度,更关注一种具有几何意义的指标,用以衡量机器人设计距离结构奇异性有多远。本文针对斯图尔特-高夫型并联机构中的一类特定构型——即所谓的线性五足机构——提出了一种可在设计过程中作为工程师判据的结构奇异性距离。从几何角度看,结构奇异设计已被充分理解并可细分为若干情形,这使得利用数值代数几何算法,计算给定线性五足机构最近的结构奇异设计这一优化问题得以求解。