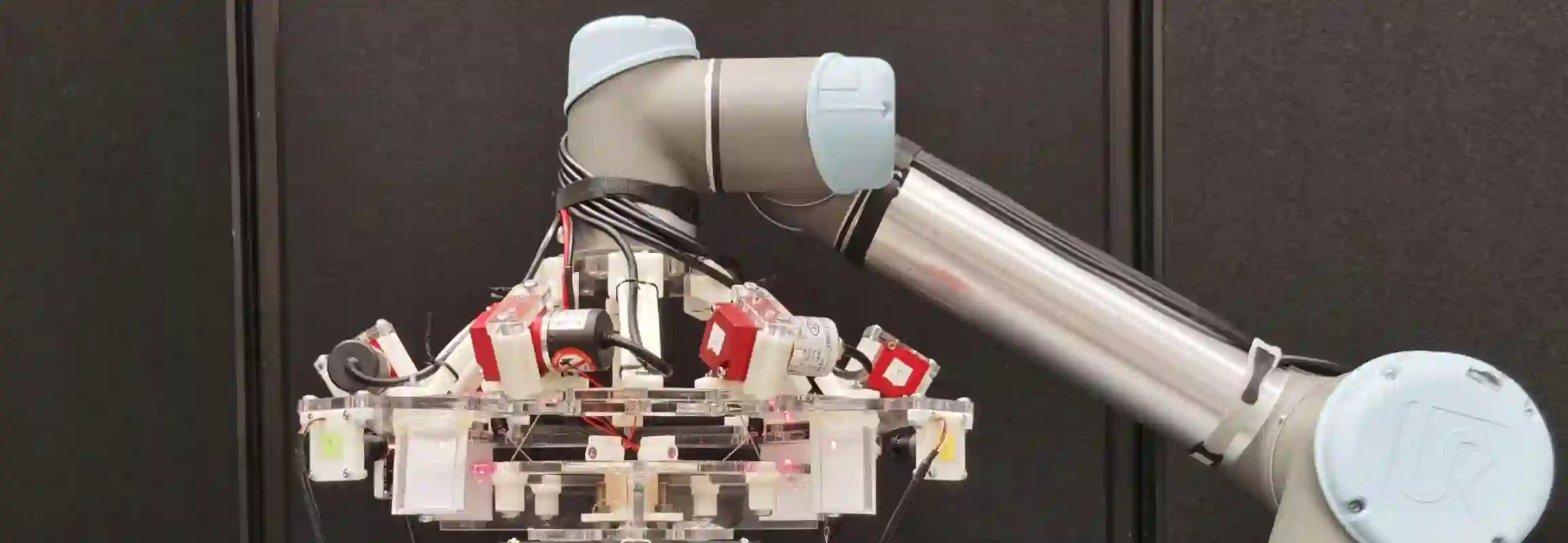
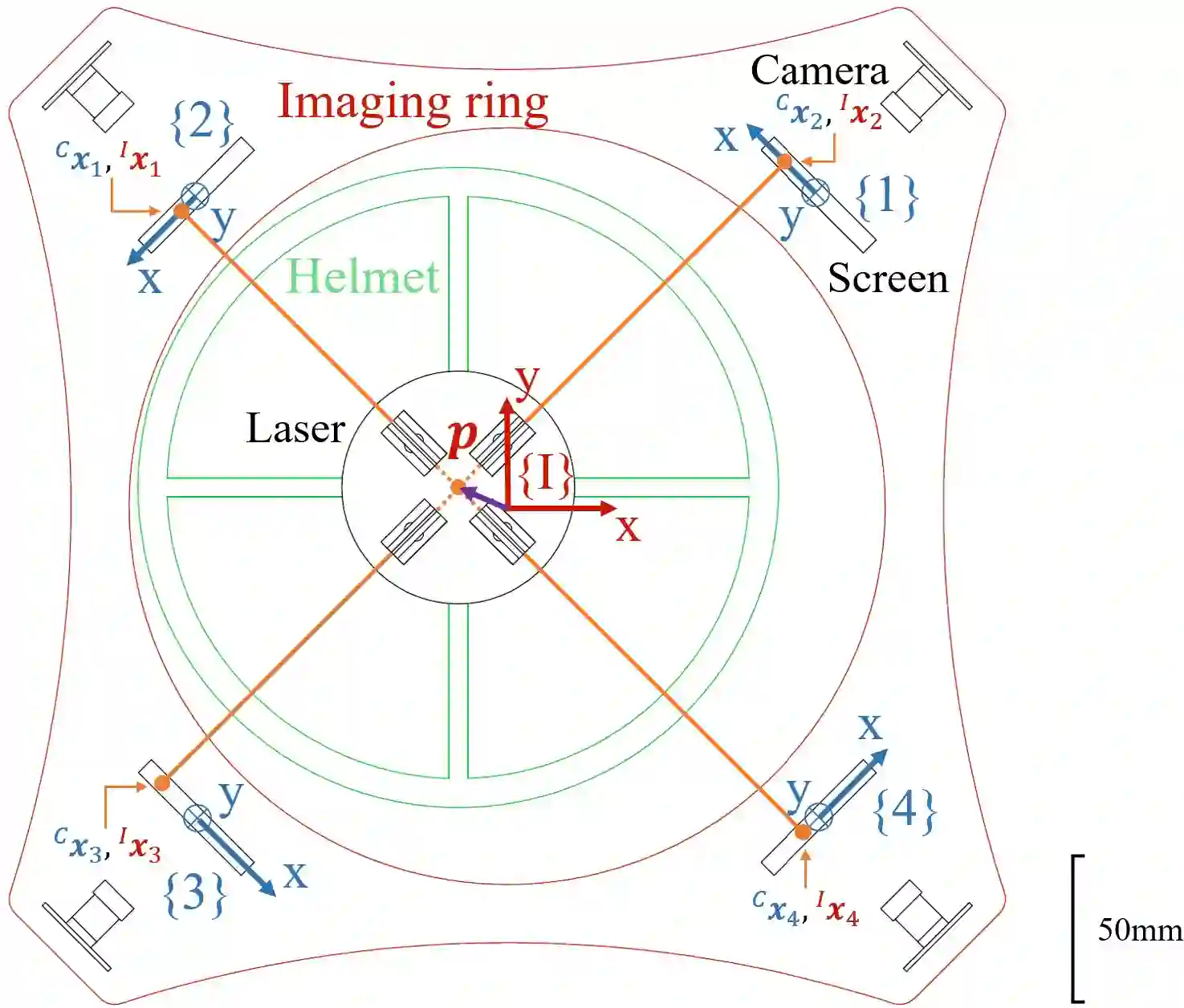
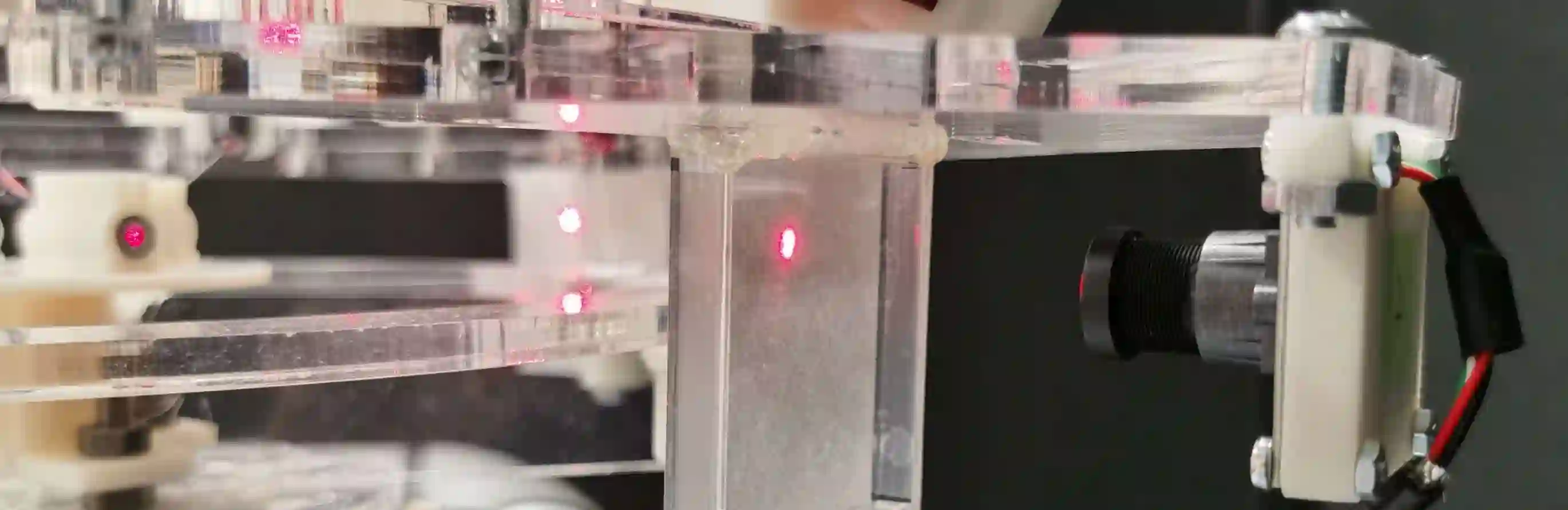
Studies of the human brain during natural activities, such as locomotion, would benefit from the ability to image deep brain structures during these activities. While Positron Emission Tomography (PET) can image these structures, the bulk and weight of current scanners are not compatible with the desire for a wearable device. This has motivated the design of a robotic system to support a PET imaging system around the subject's head and to move the system to accommodate natural motion. We report here the design and experimental evaluation of a prototype robotic system that senses motion of a subject's head, using parallel string encoders connected between the robot-supported imaging ring and a helmet worn by the subject. This measurement is used to robotically move the imaging ring (coarse motion correction) and to compensate for residual motion during image reconstruction (fine motion correction). Minimization of latency and measurement error are the key design goals, respectively, for coarse and fine motion correction. The system is evaluated using recorded human head motions during locomotion, with a mock imaging system consisting of lasers and cameras, and is shown to provide an overall system latency of about 80 ms, which is sufficient for coarse motion correction and collision avoidance, as well as a measurement accuracy of about 0.5 mm for fine motion correction.
翻译:对人体在自然活动(如运动)过程中进行脑深部结构成像的研究,将受益于在此类活动中对深层脑结构的成像能力。虽然正电子发射断层扫描(PET)能够对这些结构成像,但当前扫描仪的体积和重量与可穿戴设备的需求不兼容。这推动了一种机器人系统的设计,该系统可在受试者头部周围支撑PET成像设备,并移动系统以适应自然运动。本文报告了原型机器人系统的设计与实验评估,该系统通过连接在机器人支撑的成像环与受试者所戴头盔之间的并行弦线编码器,检测受试者头部的运动。这一测量结果用于:通过机器人移动成像环(粗运动校正),以及在图像重建过程中补偿残余运动(精运动校正)。最小化延迟和测量误差分别成为粗校正和精校正的关键设计目标。系统利用记录的人类头部运动数据(在运动过程中),配合由激光器和相机组成的模拟成像系统进行评估。结果表明,该系统可实现约80毫秒的整体延迟,足以满足粗运动校正和碰撞规避需求,同时精运动校正的测量精度约为0.5毫米。