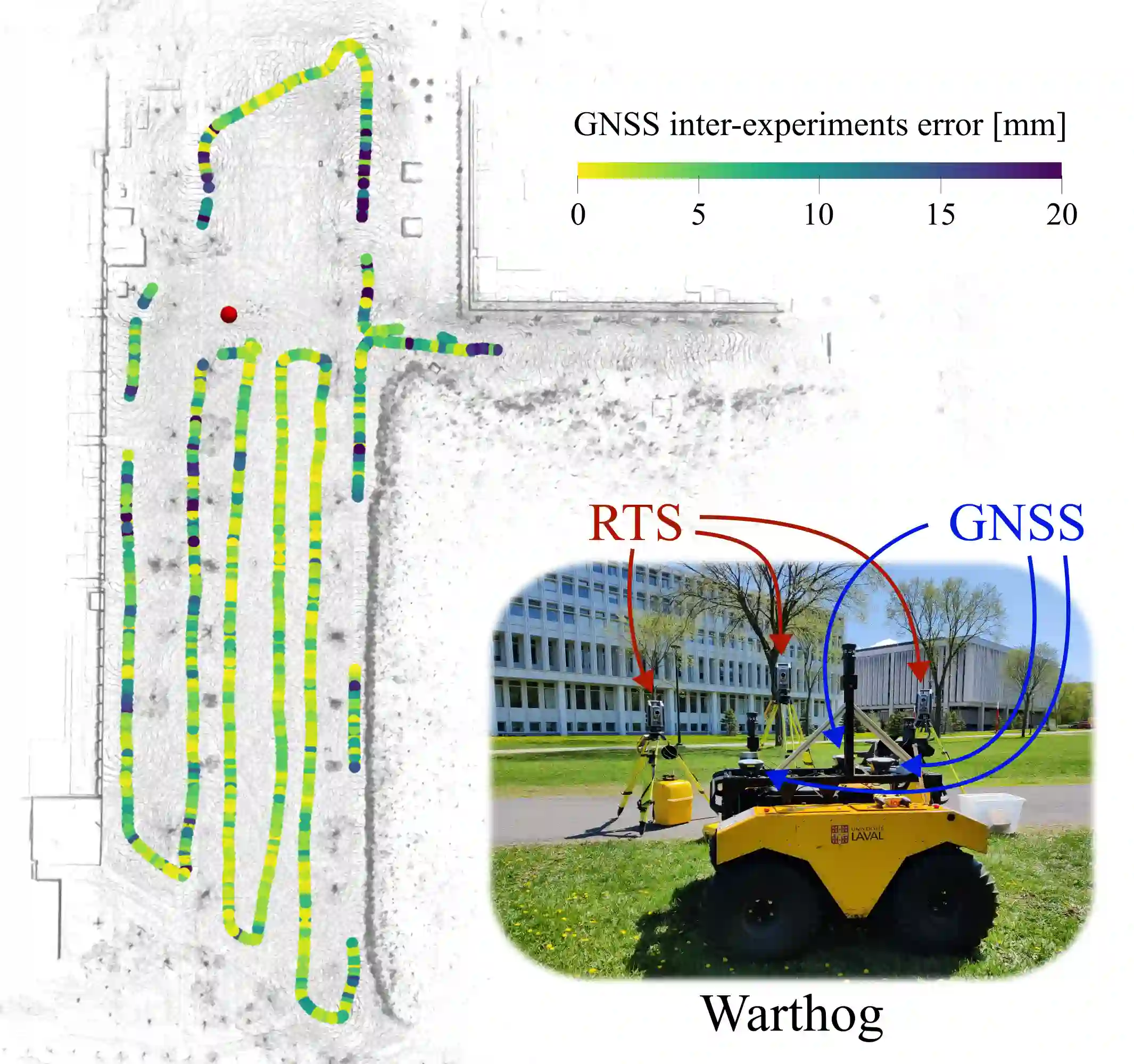
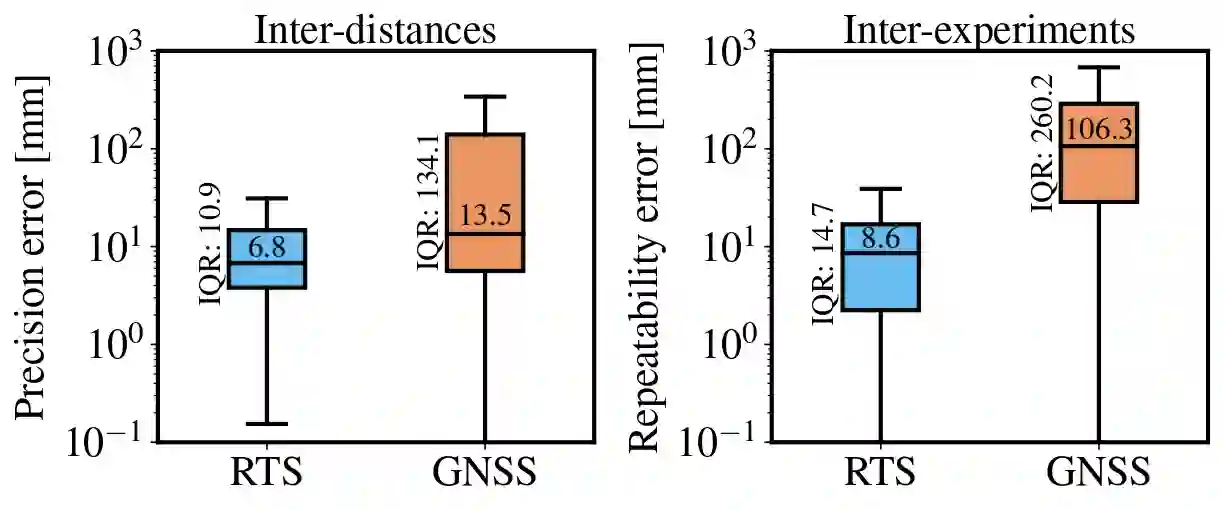
Benchmarks stand as vital cornerstones in elevating SLAM algorithms within mobile robotics. Consequently, ensuring accurate and reproducible ground truth generation is vital for fair evaluation. A majority of outdoor ground truths are generated by GNSS, which can lead to discrepancies over time, especially in covered areas. However, research showed that RTS setups are more precise and can alternatively be used to generate these ground truths. In our work, we compare both RTS and GNSS systems' precision and repeatability through a set of experiments conducted weeks and months apart in the same area. We demonstrated that RTS setups give more reproducible results, with disparities having a median value of 8.6 mm compared to a median value of 10.6 cm coming from a GNSS setup. These results highlight that RTS can be considered to benchmark process for SLAM algorithms with higher precision.
翻译:基准测试是提升移动机器人SLAM算法性能的关键基石。因此,确保地面真实数据生成的准确性和可重复性对公平评估至关重要。大多数室外地面真实数据通过GNSS生成,但这种方法随时间推移会产生偏差,尤其在遮挡区域。然而,研究表明,全站仪(RTS)设置更为精确,可替代GNSS生成地面真实数据。本研究通过在同一区域相隔数周和数月进行的多组实验,对比了RTS与GNSS系统的精度和重复性。结果表明,RTS设置可提供更可重复的结果,其偏差中值为8.6毫米,而GNSS设置的中值偏差为10.6厘米。这些结果凸显了RTS可作为更高精度的SLAM算法基准测试流程的参考方案。