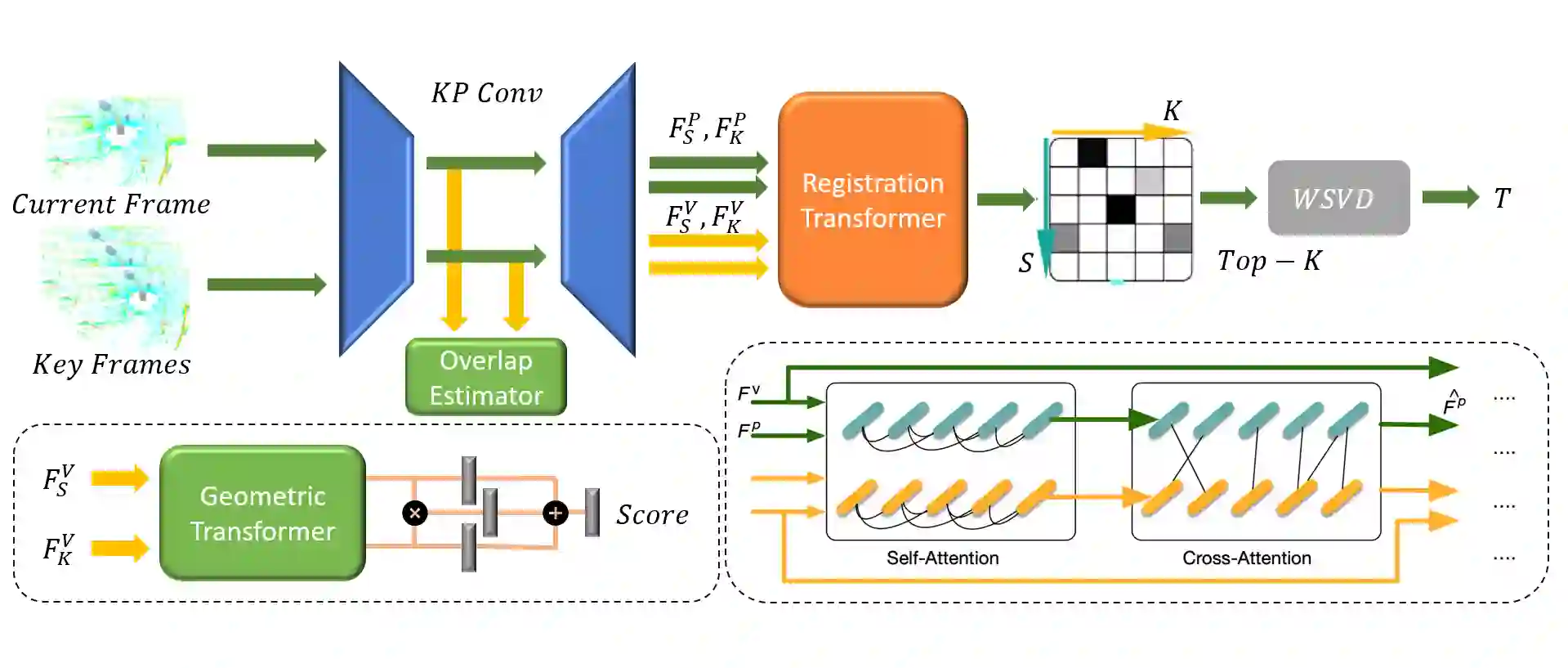
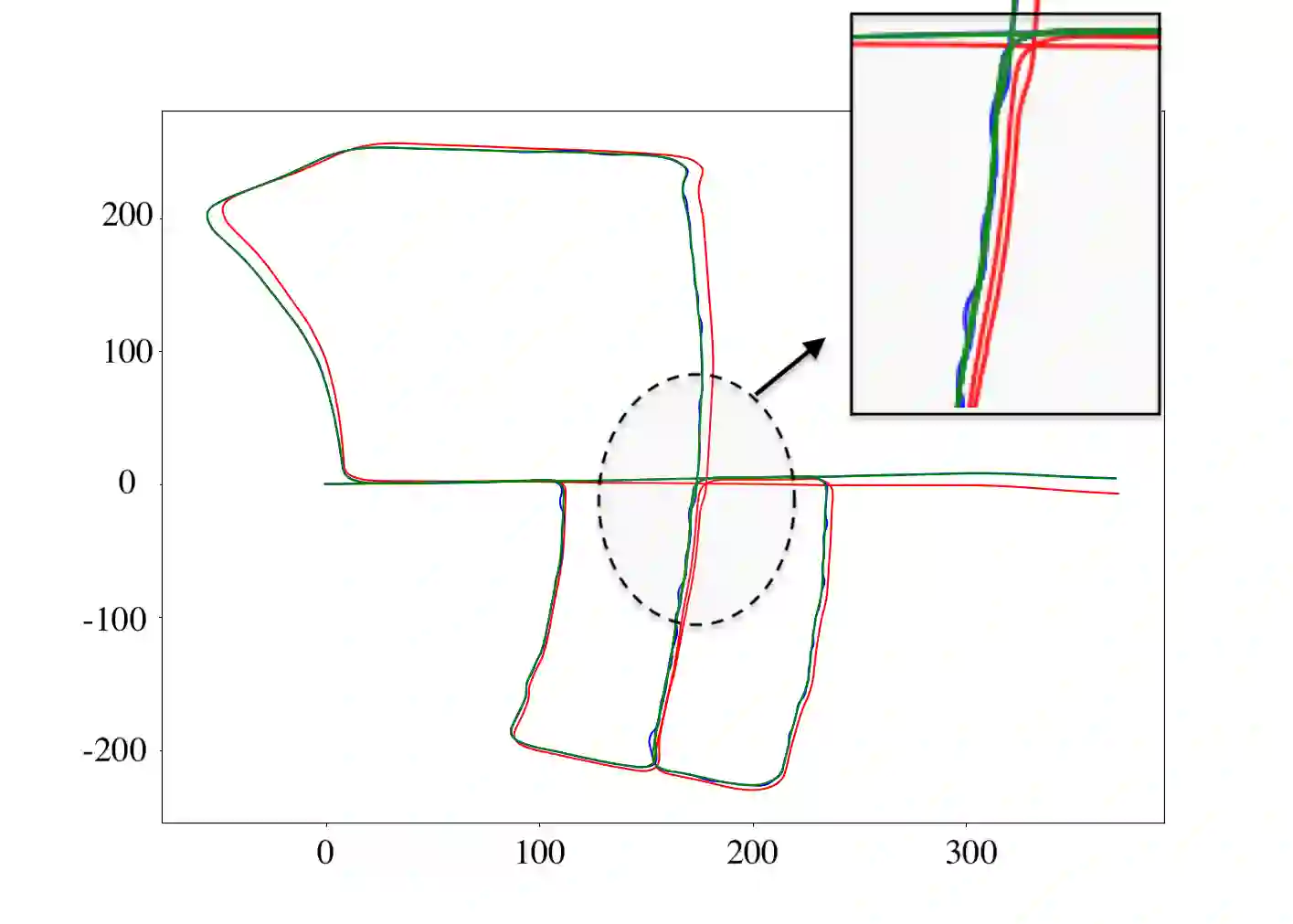
We present a novel algorithm for learning-based loop-closure for SLAM (simultaneous localization and mapping) applications. Our approach is designed for general 3D point cloud data, including those from lidar, and is used to prevent accumulated drift over time for autonomous driving. We voxelize the point clouds into coarse voxels and calculate the overlap to estimate if the vehicle drives in a loop. We perform point-level registration to compute the current pose accurately. We have evaluated our approach on well-known datasets KITTI, KITTI-360, Nuscenes, Complex Urban, NCLT, and MulRan. We show at most 2 times improvement in accuracy estimation of translation and rotation. On some challenging sequences, our method is the first approach that can obtain a 100% success rate.
翻译:我们提出了一种用于SLAM(同时定位与地图构建)应用中基于学习的闭环检测新算法。该方法面向通用三维点云数据(包括激光雷达数据),旨在消除自动驾驶中随时间累积的漂移误差。我们通过将点云体素化为粗粒度体素并计算重叠度来估计车辆是否处于闭环路径。随后采用点级配准精准计算当前位姿。在KITTI、KITTI-360、Nuscenes、Complex Urban、NCLT及MulRan等公开数据集上的评估表明:本方法在平移和旋转精度估计上实现了至多两倍的提升。针对部分具有挑战性的序列,我们提出的方法是首个能够达到100%成功率的方案。