
小型、低尺寸、重量、功率和成本的无人机因其成本效益、可消耗性及适用于分布式作战的特点,正日益广泛地应用于情报、监视与侦察任务。然而,其设计面临诸多挑战,包括有限的续航力、受约束的有效载荷能力,以及对固定视场、纯方位角相机等简单传感模式的依赖。传统的以平台为中心的设计方法无法捕获在“系统之系统”层面出现的性能、成本与协同之间的耦合权衡关系。本文提出了一种用于低SWaP-C无人机ISR架构早期设计的任务工程框架。该框架将实验设计、多目标优化和高保真仿真集成到一个闭环流程中,将设计变量与基于估计器的性能及任务成本联系起来。通过拉丁超立方采样探索候选架构,并使用遗传算法进行细化,其性能通过联邦卡尔曼滤波器的蒙特卡洛试验进行评估,并以克拉美-罗下界为基准。验证遵循“验证正方形”方法,结合了理论、经验和结构评估。一项关于在GNSS拒止海上环境中定位落水人员的案例研究表明,定位精度在亚米级达到饱和,而更高成本的配置主要增加冗余性和鲁棒性。因此,该框架量化了性能、可承受性和鲁棒性之间的任务权衡,为对抗性、资源受限的ISR任务提供了一个可扩展的决策支持工具。
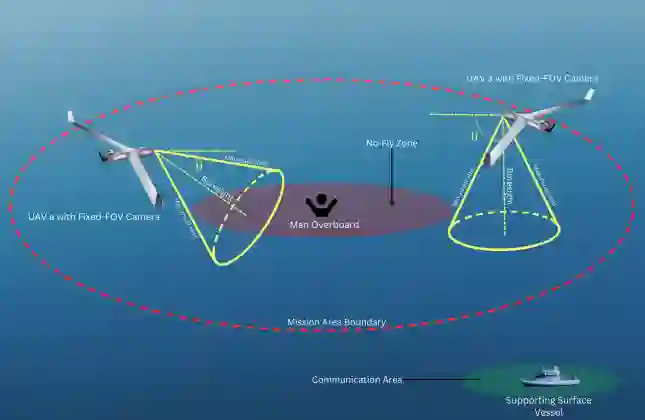
低尺寸、重量、功率和成本的小型无人机因其成本效益、可消耗性及适用于分布式作战的特点,正日益广泛地应用于情报、监视与侦察任务。当以集群或协同编队形式部署时,它们能以比传统高价值资产更低的风险和成本提供持续覆盖。然而,使用低SWaP-C无人机设计有效的ISR系统,在续航力、有效载荷能力和传感性能方面带来了挑战,要求工程师评估任务层面的效能而非单一平台的能力。传统孤立优化单个平台的无人机设计方法,无法捕获驱动“系统之系统”行为的传感器性能、航迹几何与编队协同之间的耦合权衡关系。应对这些挑战需要一个任务工程框架,能够通过自动化优化和集成仿真,将平台数量、传感器配置和协同策略等作战设计变量与任务结果联系起来。本文提出了这样一个专为低SWaP-C无人机ISR架构设计和评估量身定制的框架。它将实验设计、多目标优化和任务特定仿真统一到一个闭环流程中,将基于估计器的性能指标嵌入优化过程。该方法能够严格探索涵盖传感几何、团队协同和成本的权衡空间,同时保持对任务效能的溯源分析能力。该框架通过一个案例研究进行演示,该案例研究使用固定视场无人机在GNSS拒止的海上环境中定位落水人员。此案例阐明了如何定量揭示和优化系统层面在精度、可承受性和冗余性之间的权衡关系。尽管场景聚焦于海上搜救,但该框架可推广至其他ISR应用,为早期“系统簇”设计和任务分析提供了一个可扩展且可重复的工具。

