
本文探讨多智能体规划及其在动态环境中的应用。多智能体规划将人工智能规划与多智能体系统相结合,以协调智能体实现个体或群体目标。在动态环境中进行规划会因结果的不确定性而给协调与执行带来挑战。重规划与修复等计划恢复策略旨在处理故障并恢复期望状态。一项全面的文献综述突显了多智能体规划研究领域的关键贡献者与机构,提供了对相关概念、技术和开放挑战的见解。然而,在现有文献中,为多智能体规划模型组合不同的恢复策略仍是一个有待完成的研究挑战。本论文讨论了两个问题:评估不完整,以及对如何有机整合重规划与修复技术需要更多研究。解决这些问题旨在提高策略的有效性并提供全面的性能评估。作为解决方案,我们针对第一个问题提出了一种用于评估动态环境中恢复策略的方法。此外,设计了一个结合重规划与修复的计划恢复流程。该方法考虑了规划的复杂性、执行期间的协调性,以及智能体在寻求其他智能体帮助前尝试本地修复的行为。研究结果表明,在智能体耦合程度较低的场景中,恢复策略表现相似。同时,结果提供的条件表明,目标数量和故障在不同条件下会影响执行。最后,结果指出所设计的计划恢复流程适用于多种场景,并强调应以去中心化的方式探索修复策略,而以集中化的方式进行重规划。
关键词:动态环境;多智能体规划;多智能体系统;规划恢复策略;重规划;修复
本文件结构遵循以下格式:每一章处理评估主题范围内的一个特定目标,包括论文撰写期间发表的相关工作。关于文献综述,在期刊和会议论文中,习惯上包含一个专门部分来强调与研究主题相关的已有工作。遵循这一惯例,此类章节将出现在后续专注于介绍本论文撰写期间发表的特定工作的章节中。然而,第2章对多智能体规划研究领域及其与本论文的相关性进行了全面的综述。本章深入考察了相关研究工作,为理解本论文所进行研究提供了充分的背景和情境。为确保陈述简洁并避免概念重复,第3章提供了必要的背景知识选集。本章提供了理解后续章节所需的基础知识,为研究分析和发现奠定了基础。
第4章提出了一种用于评估受外生事件影响的动态环境中恢复策略的实证方法。一套包括仿真、数据准备和评估的活动流程支持该方法。采用T检验和相关分析等统计技术来评估恢复策略性能并分析环境变量之间的关系。多个案例研究表明,修复能提供更快的结果,而重规划则能生成更优的计划。智能体之间的耦合程度,通过公共行动比率来指示,显著影响变量间的关系。研究结果表明,修复在诸如救援行动等对时间敏感的场景中表现出色,而重规划则适用于机器人路径规划等资源受限的情况。两种策略在松耦合领域都有效,而在紧密连接的环境中,策略选择取决于优先考虑的因素。
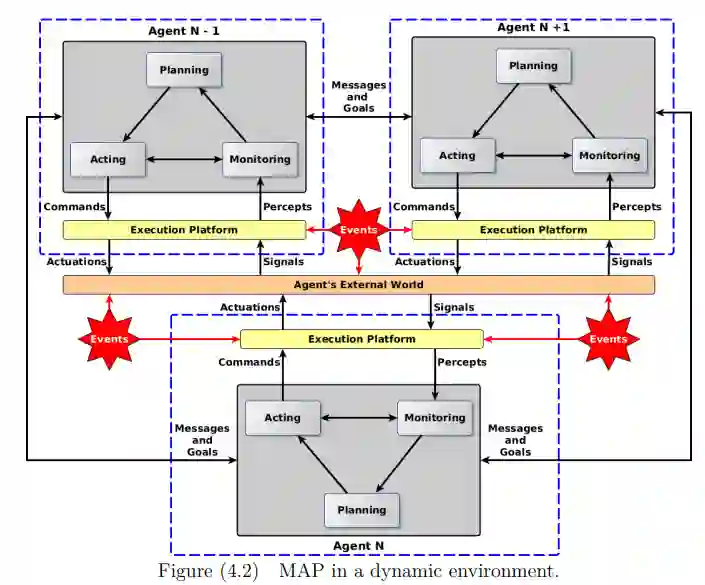
第5章重点提出了一个针对面临外生事件引发故障的动态环境的计划恢复流程。该流程通过结合重规划与修复策略以提供分层解决方案,从而区别于现有方法。它包含三个阶段:本地修复、寻求帮助和重规划。开发了一个仿真工具来评估该流程,并考虑了智能体之间不同层次的交互。结果表明,智能体在本地修复中的自主性在低影响环境中能产生更好的结果。此外,研究强调了智能体间耦合程度(通过公共行动比率指示)对恢复过程的复杂性以及性能指标的影响,这些指标包括规划时间、最终计划长度和信息交换。本章贡献了一个新颖的计划恢复流程,并揭示了动态环境中交互层次和智能体耦合的影响。
最后,第6章阐述了本文的要点、贡献以及对未来工作的建议。我们强调了影响多智能体规划及执行复杂性的因素,如资源数量、能力和协调挑战。同时,经典的多智能体规划模型在存在外生事件的动态环境中存在不足。因此,重规划和修复等恢复策略被纳入多智能体规划模型。当前的研究方案忽视了统计评估,需要对规划时间、行动和故障等指标进行超越平均值的全面分析。

