
海运业花费大量时间和资源完成长期协作任务,如搜救或海洋勘测。自主船群能够迅速扩大规模并利用有限的资源进行作业,这使它们在这些协作作业中的表现优于传统的载员船只。尽管自主船群具有惊人的潜力,但持续运作高产的自主船群也带来了巨大的后勤挑战。本论文旨在解决这些问题。具体来说,本论文旨在利用运筹学理论、模拟和机器学习,通过预测和管理机器人资源需求,最大限度地提高协作蜂群的生产率。
要最大限度地提高机器人群的生产率,首先需要开发一种通用场景来衡量生产率。本论文借鉴多机器人巡逻研究,在 MOOS-IvP 中实现了两个资源感知多机器人巡逻任务。在每个任务中,航行器在网格中持续巡逻,并必须定期中断巡逻编队,前往补给站补充燃料。任务根据机器人访问任务操作区域各部分的频率(网格空闲时间)和每个机器人控制的区域面积(Voronoi 多边形平均面积)来衡量其性能。在开发出通用巡逻场景后,本论文使用不同的车辆和仓库参数模拟巡逻任务,以生成广泛的性能数据集。
最后,本论文开发了一种方法,可从模拟生产力数据集预测未来的任务性能。模拟任务数据经过后处理后用于训练 XGBoost 模型。与任务模拟相比,这些模型的制作时间要短得多,同时还能向规划人员展示特定任务的性能和航行器产出。
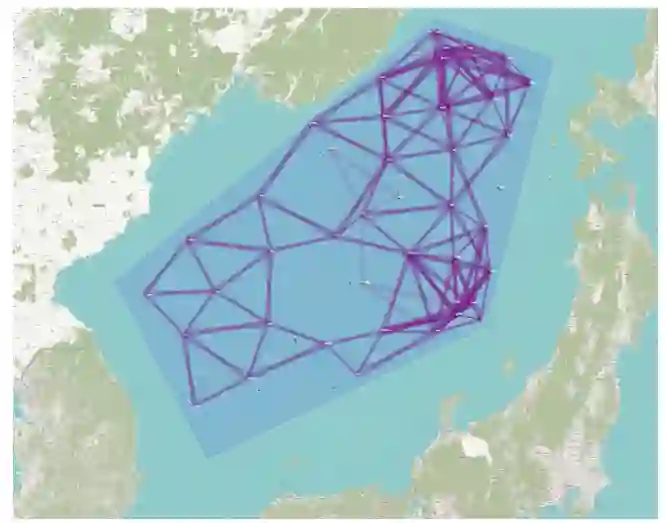
图 3-3:蜂群工具箱任务演示,显示 50 辆航行器在有限通信方案下动态散布[Ben22]。
成为VIP会员查看完整内容
相关内容

Arxiv
232+阅读 · 2023年4月7日
Arxiv
88+阅读 · 2023年4月4日
Arxiv
156+阅读 · 2023年3月29日
最新内容
相关VIP内容
相关资讯
相关论文
Arxiv
232+阅读 · 2023年4月7日
Arxiv
88+阅读 · 2023年4月4日
Arxiv
156+阅读 · 2023年3月29日