人工智能在预测科学属性方面已展现出卓越的能力,然而科学发现本质上是一项由实验周期驱动、立足于物理世界的长程探索。当前的计算方法大多与这一现实存在错配,往往将“发现”视作孤立的、针对特定任务的预测,而非与物理世界的持续交互。 在此,我们倡导具身科学 (Embodied Science) 范式,该范式将科学发现重构为智能体推理与物理执行紧密耦合的闭环过程。我们提出了一个统一的感知-语言-行动-发现 (PLAD) 框架:在该框架下,具身智能体感知实验环境,基于科学知识进行逻辑推理,执行物理干预,并将实验结果内化以驱动后续探索。通过将计算推理植根于稳健的物理反馈,该方法弥合了数字预测与实证验证之间的鸿沟,为生命科学与化学领域的自主发现系统指明了发展路径。 1 引言
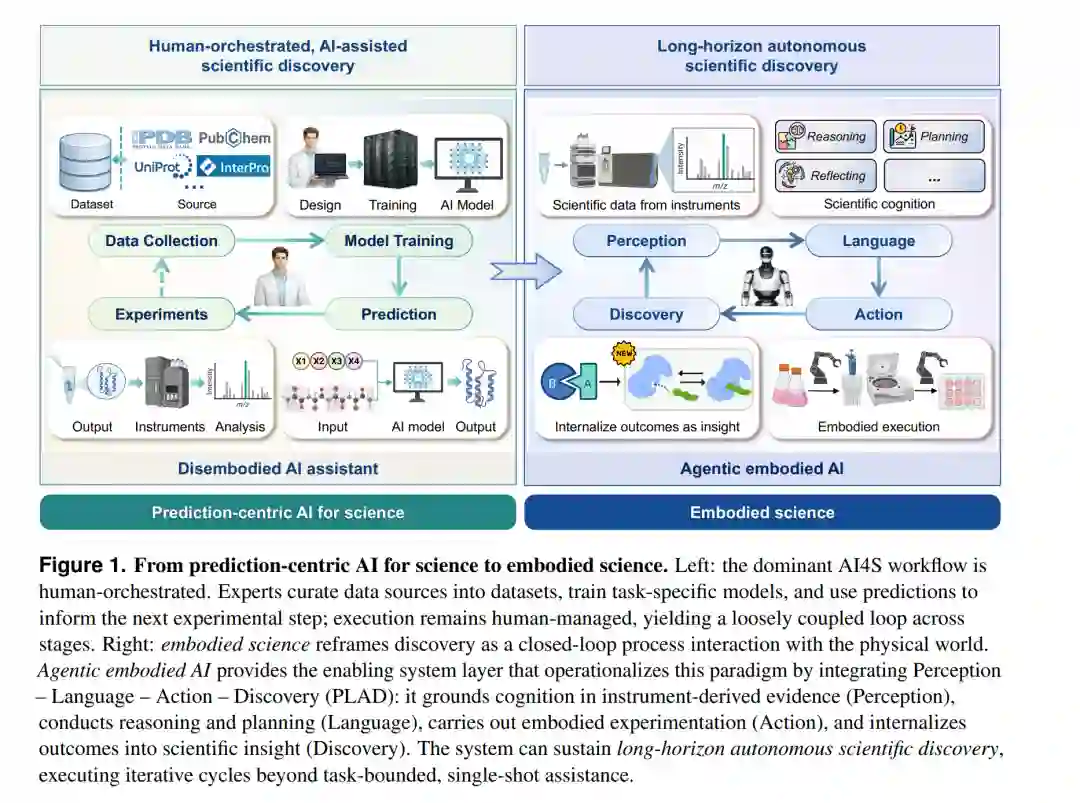
人工智能正深刻重塑科学知识的产出与实践范式 [1]。过去十年间,数据驱动模型在诸多曾被视为难题的领域取得了突破性进展,涵盖了高精度蛋白质结构预测 [2, 3]、分子属性预测模型 [4–6]、生成式设计 [7, 8] 以及合成路径规划 [9]。这些成就,连同能够统一跨模态表征的基座模型 (Foundation Models) 的兴起 [10–12],正推动“人工智能驱动的科学研究” (AI for Science, AI4S) 从单一的专用预测器集合向更通用的科学引擎演进 [13]。 然而,一个核心矛盾依然存在:科学发现并非单次推理 (Single-shot inference) 问题。 科学突破通常源于与物理世界长程且迭代的交互——这是一个涵盖假设生成、实验设计、现实约束下的执行、结果分析及模型修正的持续循环 [14, 15]。即便预测模型表现卓越,若系统无法自主决策后续步骤、无法解析仪器信号、或无法将决策转化为可靠的实验室操作,科学发现进程便会陷入停滞。 近期研究揭示了这种不匹配所导致的“双轨化”格局:一类是基于大语言模型 (LLM) 的智能体 [16–20],它们通过语言介导的推理、规划与工具调用扩展了认知范畴,旨在将高层科学意图转化为实验方案或工作流;另一类则是自动化机器人实验室 [21, 22],它们在预定义的实验空间内实现了稳健的具身执行。这种分野反映出一个深层现状:AI 目前对科学的影响仍集中在认知增强(如数据处理与模式识别),而下一步的关键挑战在于扩展感知与实验能力,以探索并获取超越“静态数据集”的新型经验证据 [23]。 本质上,这种分野并非单纯依靠“模块连接”即可消除的集成缺口,而是因为现有框架分别优化了科学发现的不同侧面:认知侧虽强但缺乏仪器级证据与物理约束的底层锚定 (Grounding),执行侧虽稳健但受限于预设目标与程序边界。若不将科学发现重构为端到端的闭环,单纯的增量式扩展(如更强的规划器或更大的模型)只会加剧系统的碎片化。 因此,科学发现的自主性源于系统的耦合特性。当感知 (Perception)、认知 (Cognition) 与行动 (Action) 这三大结构化要素中的任何一项脱节时,持续探索所需的容量扩展便难以为继。 * 感知层面:科学证据直接产生于仪器而非整理好的数据集。原始光谱、色谱、显微流及传感器日志中包含了实验漂移、失败与环境上下文。在清洗后的数据表上训练的模型往往无法解析这些多模态且不完美的信号,更无法进行目标导向的传感(如在异常发生时自适应地重测或切换模态)。 * 认知层面:现有的 AI4S 系统多针对结构预测或属性回归等定义明确的任务进行优化,但长程发现需要持久的目标管理、不确定性下的实验推理以及对成本与突发状况的权衡 [24]。这不仅涉及选择实验,还涉及决定测量维度、干预时机以及根据证据演化修正假设。 * 行动层面:科学发现的核心在于对现实世界的干预 [25]。多数 AI4S 流程止步于候选建议,而现实实验室则要求精准且可验证的操作——从试剂操作、仪器配置到安全约束下的故障恢复。缺乏稳健的行动锚定,所有“建议”都无法转化为真正的发现。
基于此,我们倡导将具身科学 (Embodied Science) 作为长程自主发现的基础范式。在具身科学框架下,人工智能不再仅仅是数据分析器或建议提供者,而是作为感知、推理与执行闭环的有机组成部分直接介入实验流。科学进步将源于与真实实验环境的持续交互,而非对静态数据集的单次计算。这一视角将 AI 驱动的发现重塑为一个探索驱动的过程,使科学假设、实验策略与操作行为在与物理世界的反复交互中实现协同演化。