
太空领域已迅速演变为一个竞争性、机动驱动的环境,高超音速威胁和自主对抗系统要求新的建模与仿真方法。传统的基于保真度的建模与仿真方法不足以预测和击败这些新兴威胁。本文提出一种集成的建模与仿真框架,该框架利用亚纳秒级授时同步、分布式认知传感和实时数字孪生架构,以实现空间领域的力量战备。亚纳秒级授时,结合通过稀疏分布式阵列和6G波形创新实现的厘米级传感精度,增强了对机动高超音速威胁的预测建模能力。由持续更新的传感器和交战数据驱动的数字孪生,能够实现实时负数据验证、早期威胁识别和优化的拦截轨迹预测。
在此环境中实现真实感不仅需要视觉保真度,更要求在模拟实体之间、相关联的环境现象之间,以及跨轨道层、大气层和地面层的异步与同步行为建模之间实现精确的因果同步。亚纳秒级的先进授时机制通过确保分布式建模与仿真元素之间一致且因果合理的交互,直接支持实现更高的真实感。
力量战备被重新定义为一种动态、持续的优化循环,整合了实时人机决策支持、认知行为建模和同步效应。扩展到数百万个交互实体和环境的能力对于保持作战相关性至关重要。这一下一代框架将北约的建模与仿真能力从静态、反应式系统转变为动态、预测性交战平台,这对于确保在日益竞争性的空间环境中取得多域优势至关重要。
太空领域已迅速转变为一个竞争性、机动驱动的环境,其特点是高超音速滑翔飞行器和在轨自主系统等新兴威胁的出现。北约及其盟友日益认识到空间作为一个作战域,其战略资产面临对手反太空能力的威胁。威胁格局的这种演变要求用于空间行动的建模与仿真方法发生范式转变。传统的仿真方法——通常侧重于孤立系统的高视觉或物理保真度——已被证明不足以预测和击败这些快速移动、复杂的威胁。事实上,许多遗留系统拥有惊人的图形细节和分辨率,但在对手行为模型中缺乏“认知合理性”。正如一位观察家所指出的,其结果可以比作“一部拥有惊人特效但情节极简的大预算电影”——视觉上令人印象深刻,但未能捕捉有效训练和任务演练所需的动态因果现实。
为确保在此环境下的力量战备,我们概述了一个下一代建模与仿真框架,该框架利用亚纳秒级授时同步、分布式认知传感以及实时数字孪生架构。这种集成方法将北约的建模与仿真能力从当今的静态、反应式仿真转变为动态、预测性交战平台。通过强调精确的因果同步、相关联的环境现象学以及人类决策者与人工智能的集成,该框架解决了限制以往仿真的根本性差距。其目标是支持跨轨道层、大气层和地面层的战术与决策的持续、实时优化,并能够实时扩展到数百万个实体。与北约对联盟互操作性和作战战备的重视相一致,所提出的方法旨在容纳多国仿真资产并适应联合需求。本文基于在表征真实感和复杂系统同步方面的最新进展和基础工作,概述了该框架的动机、关键组成部分和优势。
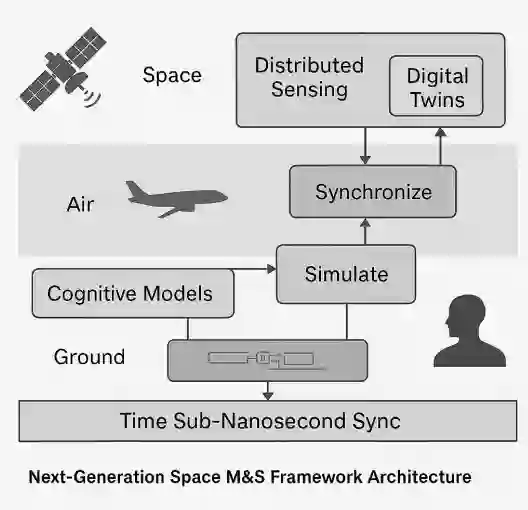
图1:展示跨太空、空中和地面层的亚纳秒级时间同步、分布式传感、数字孪生和认知模型的概念架构。
分布式认知传感:6G波形与稀疏阵列
该框架的第二个主要支柱是一个先进的传感和数据收集层,它为仿真提供实时、高保真度的观测数据。在空间领域作战的背景下,这等同于一个分布式传感器网络——既包括太空中的也包括地面的——它们协同工作,以极高精度探测、跟踪和识别物体或现象。我们利用新的6G通信波形创新和分布式雷达/阵列技术来实现厘米级的传感精度和全面覆盖。与传统的单体传感器不同,分布式阵列由许多空间上分离的传感节点组成,其数据被相干融合。如果这些接收器彼此之间相位同步,它们就能像一个巨大的虚拟传感器一样有效运作,处理聚合信号,类似于分布式MIMO雷达。稀疏分布式阵列的概念意味着,散布在数百公里范围内的一簇纳卫星或一组地面站可以联合感知一个物体——每个节点贡献一部分信号,并通过精确的授时和相位组合,产生高分辨率的合成视图。
具体而言,6G信号提供了巨大的带宽,这直接转化为精细的距离分辨率。研究表明,通过在这些频率下使用载波相位测量,可以在受控条件下获得毫米级的测距精度,在更具挑战性的条件下也可达到厘米级精度。这对于空间态势感知来说是颠覆性的:想象一下,跟踪一个高超音速飞行器或一个低可观测空间物体,并实时掌握其厘米级精度的位置。这种精度水平支持更有效的轨迹预测和瞄准。此外,6G的集成传感与通信概念意味着,用于数据链路的相同波形可以兼作类雷达传感信号。这种双重用途对于卫星或地面塔的分布式网络来说是理想的——每次通信交换也可以产生距离、多普勒、角度等的测量结果,输入到仿真的实时态势图中。
在我们的框架内,分布式认知传感层执行持续的环境观测,并为数字孪生提供更新的输入。“认知”一词强调这些传感器不是简单的收集器;它们使用人工智能/机器学习来聚焦于显著数据并适应威胁环境。例如,在一次高速交战中,传感网络可能会自主重新配置——例如,改变波束模式或将更多带宽分配给探测到高超音速导弹的区域——以保持最佳跟踪。每个传感节点可以被视为一个智能体,为集体态势感知做出贡献。融合来自分布式传感器的数据本质上需要仔细处理时间,因此亚纳秒级同步至关重要,并且需要一个高效的数据分发架构。在某些情况下,可能需要汇集来自多个传感器的原始信号样本,这要求高吞吐量链路。在其他情况下,传感器可能进行本地处理,仅共享过滤后的信息。我们的框架允许任一模式,但强调当可能实现相位相干融合时,应利用该模式以获得最大精度。现代的6G试验台和理论支持这一点:如果多个基站或卫星共享一个共同的时间/相位参考,联合处理可以产生一个统一的传感结果,就如同一个单一的大型阵列观测目标一样。
此外,该传感层是多模态的。它不仅限于雷达或通信信号;它可以包括光学传感器、红外传感器、电子情报探测器等。关键在于它们的输出在数字孪生内部在时间和空间上是相关联的。例如,在通信频谱中检测到的模式可能提示光学望远镜聚焦于某个特定位置,所有这些都在仿真的预测循环内进行。通过捕捉这种跨域传感器效应,仿真实现了环境现象学关联——这意味着仿真对环境的表现形式在所有现象上是一致的,而不是每个传感器都存在于其自身的合成世界中。北约最近在相关联动态合成环境方面的工作呼应了这一要求:环境模型必须以共同的方式进行更新和共享,以便每个参与者,无论人还是机器,都在一个单一的真实源上操作。
总之,通过将基于6G的尖端分布式传感集成到建模与仿真框架中,我们确保战场空间的数字表征既精确又全面。亚纳秒级授时使这些传感器能够作为一个整体运行,而其认知自动化确保了在正确的时间获得正确的数据。该传感层实质上是数字孪生的“眼睛和耳朵”,为其提供连续不断的、经过验证的高保真观测数据流。下一节将讨论如何利用这些观测数据在实时数字孪生模型中进行交战预测和决策。

