
本文提出一种为具备不同能力的异构无人机编队生成协同行为的概念,旨在支持未来军事有人-无人协同直升机任务中复杂任务的执行。在此类任务中,飞行员不仅需要操控自身直升机,还需管理大量无人机。此场景会迅速造成飞行员工作负荷过载,并可能导致可用资源利用不足。为防止这种情况,我们为飞行员创建了一个易用的指挥界面,允许其仅通过选择必要参数即可向无人机分配多项任务。这些参数随后被用于自动分配资源,并生成一个易于调整的任务计划。此概念将支持复杂的多无人机任务,并将集成到我们的任务与座舱模拟器环境中,供德国陆军飞行员进行测试与验证。
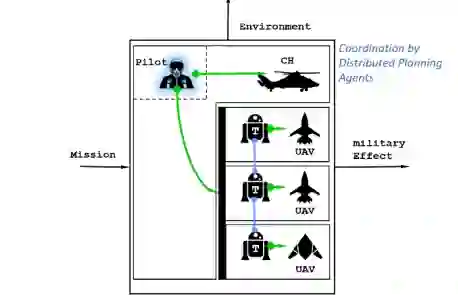
有人-无人协同任务考虑有人与无人航空器为达成共同目标而进行的协同。人类飞行员指定待完成的任务,并将其分配给编队中的每架无人机。在驾驶直升机的同时,对无人飞行器进行任务分配与监控,会给飞行员造成相当大的精神负荷。
因此,任务分配的方式至关重要,这也一直是我们研究组的长期重点。所采用的主要设计模式之一是基于任务的引导。此概念可定义为所有层级对权限的共享及对共同目标的追求。在这种情况下,人类操作员仅将高层级任务委派给无人机代理,后者则必须理解、分解并执行这些任务。一个任务可由以下部分组合定义:
- 任务目标:任务实施的对象。
- 行动:任务完成的方式。
- 限定信息:任务特定的参数或约束条件。
为使任务分配成功,平衡人力任务与自动化任务非常重要。自动化程度过高可能导致飞行员对系统失去信任,而自动化程度过低则可能因任务过多而使飞行员不堪重负。因此,至关重要的是不仅要提供合适的高层参数,还要提供充分的反馈。这种反馈可来自辅助系统或其他力求实现透明度的方式。辅助系统会分析当前任务,并识别其是否会产生过高的工作负荷。若是,则会进行相关干预。以透明度为重点的反馈关注应向飞行员提供多少系统信息。尽管直观上,信息过度呈现会占用飞行员过多注意力,但研究表明这并不会显著增加工作负荷,且能带来对系统更高的信任。
为在涉及大量无人机的有人-无人协同任务中解决此问题,本文提出一种自动化任务分配流程,该流程可分解为四个部分:
- 飞行员选择一个高层级任务。
- 自动化系统生成一个达成所述目标的建议计划,包括: a. 为任务选择合适的无人机编队。
b. 在无人机间分配子任务。
c. 选择特定参数以最优执行任务。 - 飞行员批准该计划或要求重新生成。
- 计划被执行,并向飞行员返回反馈。
由于飞行员可从中选择的任务高度通用,因此有必要为每项任务定义预期的无人机行为及其他参数,例如任务成功指标。本文针对两个具体用例对此进行了详细探讨:一是需要同时攻击多个目标的协同攻击;二是需要获取某地点或目标信息的侦察任务。
本文亦重点关注如何将此方法应用于攻击直升机模拟器,该模拟器涉及两种主要不同类型的无人机:一是可配备多种不同类型传感器和武器的高价值无人机;二是可由本机、其他无人机甚至地面发射的小型可消耗飞行器。
