
在反无人航空器系统(C-UAS)领域,一个常用术语是探测、跟踪与识别(DTI)。DTI包括探测、定位、跟踪、分类与识别。本报告全面概述了探测、定位与跟踪技术,重点阐述了所涉及的复杂性和挑战,并触及分类与识别技术。报告通过界定关键术语和概念(如C-UAS、C-UAS传感器、C-UAS系统、C-UAS解决方案)建立了一个共同的语境。传感是指使用技术和方法来探测物理现象:报告探讨了各种C-UAS传感模态,包括声学、光电、雷达和射频(RF)传感器。报告重点阐述了每种模态的优势与局限,以及传感器数据融合在实现更有效、更稳健的C-UAS探测、定位与跟踪中的重要性。
本报告提供了技术概览,并为参与C-UAS领域的利益相关方之间的社群构建和信息共享,提供实用指南和操作支持。报告面向那些希望对C-UAS探测、跟踪与识别所涉及的复杂性和挑战有更深入理解,并希望了解C-UAS技术最新发展的读者。
目录
摘要
1 引言
1.1 欧洲反无人机系统(EC C-UAS)政策
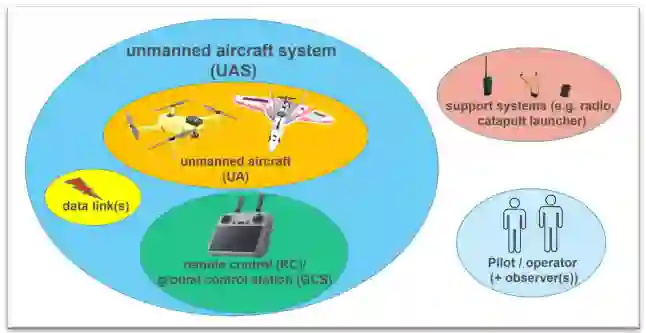
1.2 定义
1.3 反无人机系统保护模型
2 探测、跟踪与识别
2.1 人类探测与跟踪无人机的简单示例
2.2 探测无人机的一般原理
2.3 探测、定位、跟踪与确认
2.4 分类与识别
2.5 传感器局限性
3 探测、定位与跟踪技术
3.1 声学传感系统
3.2 光电(相机)传感系统
3.3 基于雷达的传感系统
3.4 基于射频的传感系统
3.5 人类感应
3.6 探测、定位与跟踪技术总结
4 技术融合
4.1 组合传感系统覆盖范围
4.2 传感器数据融合
4.3 多变量反无人机系统性能
4.4 测量系统性能
5 结论
参考文献
附录
成为VIP会员查看完整内容
相关内容

最新内容
相关VIP内容
相关资讯
相关论文