
【摘 要】 高效的多机器人团队需要能够在复杂环境中实现目标,以应对搜索和救援等现实世界的应用。多机器人团队应该能够以完全分散的方式运作,单个机器人团队成员能够在没有邻居之间明确沟通的情况下采取行动。
美国陆军研究实验室Brian Reily等人提出了一种新颖的博弈论模型,该模型可以实现去中心化和无通信导航到目标位置。每个机器人都通过估计其本地队友的行为来实施自己的分布式博弈,以识别使他们朝着目标方向移动的行为,同时避开障碍物并保持团队凝聚力而不发生碰撞。从理论上证明了生成的动作接近纳什均衡,这也对应于为每个机器人确定的最佳策略。实验表明该方法可以通过多机器人系统实现分散式和无通信导航到目标位置,并且能够避免障碍物和碰撞、保持连接性并对传感器噪声做出稳健响应。
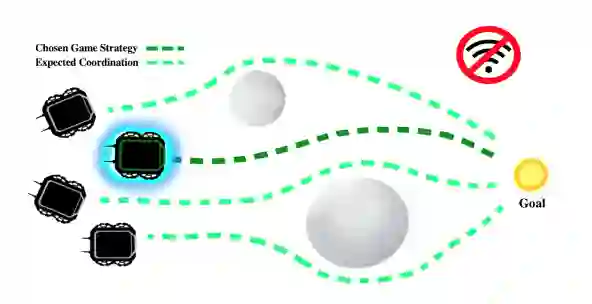
该方法可以实现分布式和无通信导航。以蓝色突出显示的机器人在考虑其邻居的预期策略及其策略对它们的影响后选择其策略,而没有实际交流。这样,蓝色机器人就可以避免碰撞,保持团队凝聚力,避开障碍物,朝着目标位置前进,无需直接沟通。
成为VIP会员查看完整内容
相关内容

专知会员服务
43+阅读 · 2022年4月4日
Arxiv
0+阅读 · 2022年4月20日
Arxiv
0+阅读 · 2022年4月19日
相关主题




最新内容
相关VIP内容
专知会员服务
43+阅读 · 2022年4月4日
相关资讯
相关论文
Arxiv
0+阅读 · 2022年4月20日
Arxiv
0+阅读 · 2022年4月19日