摘要——随着人工智能的飞速发展,多智能体系统(MASs)正从经典范式向基于大基础模型(LFMs)的架构演进。本文对经典多智能体系统(CMASs)与基于大基础模型的多智能体系统(LMASs)进行了系统性的综述与比较分析。首先,在闭环协作框架内,本文从感知、通信、决策和控制四个基本维度对 CMASs 进行了回顾。在此框架之上,LMASs 通过集成 LFMs,将协作从低层级的状态交换提升至语义级的推理,从而在多样化场景中实现更灵活的协作与更强的自适应性。随后,本文通过架构、运行机制、自适应性及应用场景等维度,对比分析了 CMASs 与 LMASs 的异同。最后,本文提出了对 MASs 的未来展望,总结了当前面临的挑战与潜在的研究机遇。
索引词——人工智能,多智能体系统,大基础模型,智能体化 AI (Agentic AI)。
I. 引言
多智能体系统(MASs)已成为人工智能研究的核心范式,在机器人学 [1]、社交智能 [2] 及卫星系统 [3] 等多个学科中得到了广泛应用。受生物集群以及复杂分布式系统的功能需求启发 [4], [5],MASs 重点研究多个自主智能体如何通过交互实现全局协作或集体智能 [6]。与单智能体系统相比,MASs 为建模现实世界环境中多个自主实体之间的复杂交互与协作提供了一个自然框架 [7], [8]。
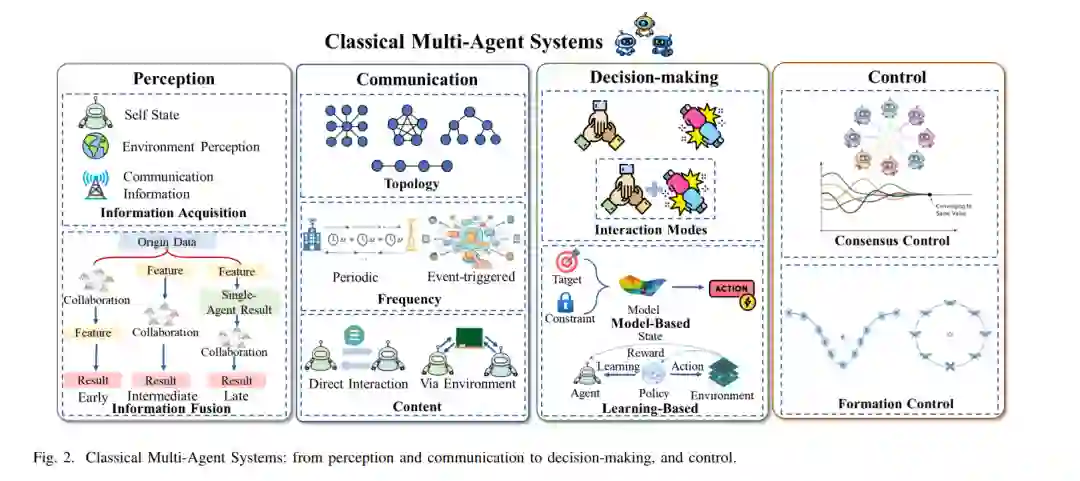
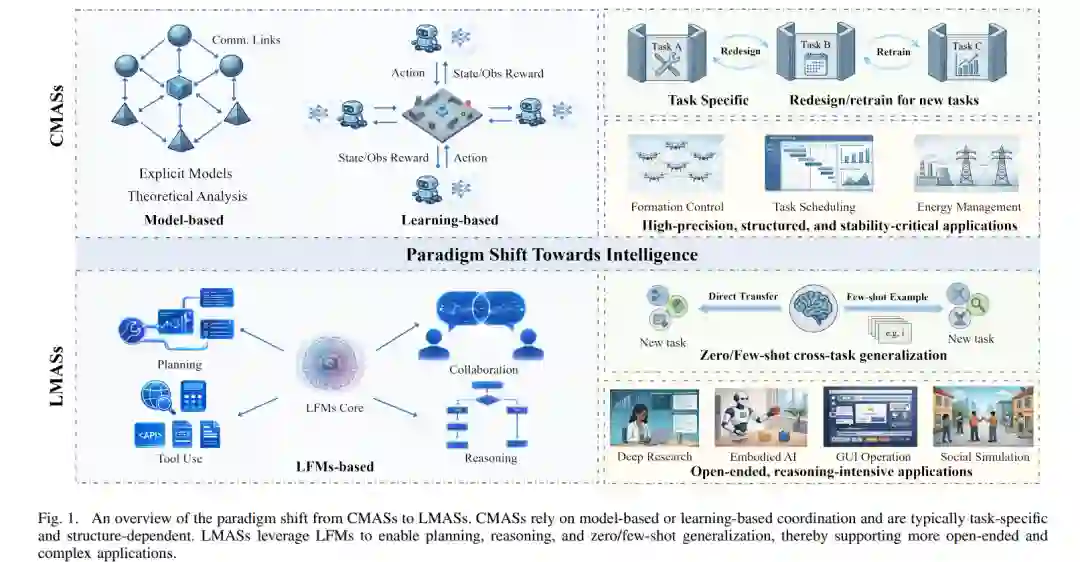
在本综述中,未融入大基础模型(LFMs)的 MASs 统称为经典多智能体系统(CMASs) [9], [10]。CMASs 依赖于显式设计的系统模型或特定任务的学习机制。从方法论角度看,现有的 CMASs 研究大致可分为基于模型的方法和基于学习的方法。基于模型的研究已逐步确立了多个经典问题领域和理论框架,包括一致性控制 [11]、编队控制 [12]、任务调度 [13] 以及生物启发优化 [14]。这些研究通常假设系统可建模且目标明确,以确保可证明的稳定性和性能 [9]。然而,在环境不可建模、系统动力学未知及部分可观测的场景下,依赖显式建模和控制设计往往受到限制。因此,诸如多智能体强化学习(MARL)等基于学习的方法作为重要的替代方案应运而生,使智能体能够在无需精确模型的情况下,通过交互学习协作策略 [15]。虽然这一范式部分缓解了复杂环境下的模型依赖问题,但 MARL 在采样效率、稳定性、可解释性和泛化性方面仍存在局限性 [16]。
CMASs 的局限性激发了对具备推理能力的更通用方法的探索,从而促进了大基础模型(LFMs)与 MASs 的集成 [17]。在 MASs 背景下,LFMs 充当智能体的认知核心。它们使智能体能够解析非结构化的多模态输入、保持上下文理解、对复杂任务进行推理,并生成高层级的动作或交互信息 [18]。这使得智能体的运行从 CMASs 中预定义的系统模型、手工规则或特定任务策略,转向语义级感知和基于语言的交互,从而实现更灵活的协作 [19]。这一演进标志着从特定任务、环境受限的 CMASs 向更具自适应性、通用性且具备认知能力的基于大基础模型的 MASs(LMASs)的根本性范式转换。通过利用 LFMs 的预训练知识和推理能力,这些系统能够执行复杂的步进式规划、知识检索和高层级决策 [20], [21]。如图 1 所示,与为固定环境量身定制的 CMASs 不同,LMASs 具有良好的泛化性,并能跨任务积累经验,支持在开放、动态场景下的灵活协作 [22], [23]。
现有的 LMASs 综述主要侧重于基于 LFM 的范式,并总结了系统架构、协作机制和应用场景 [8], [20], [24], [19], [25]。与这些孤立研究 LMASs 的综述不同,我们提出了一个连接 CMASs 和 LMASs 的统一视角。LMASs 并非 CMASs 的替代品,而是一种互补性的扩展,它利用高层级推理和泛化能力增强了经典系统,而 CMASs 在可靠的底层控制和理论保证方面依然不可或缺。通过对其架构和方法论关联进行细粒度、多维度的分析,我们旨在促进两者的协同演进,并为未来研究提供共同进步的路径。
本文的主要贡献如下: 1. 本综述全面概述了 MASs 的核心理论和最新进展,涵盖了 CMASs 和 LMASs。 1. 从理论和应用两个维度对比了 CMAS 和 LMAS 范式,突出了它们的异同,并揭示了范式转换如何重塑 MASs。 1. 讨论了 MASs 发展中的关键研究挑战和潜在的未来方向。
第二节对 CMASs 在多个关键维度上进行了结构化回顾。第三节从多个核心方面对 LMASs 进行了系统分析。第四节通过对比分析阐明了 CMASs 向 LMASs 范式转换背后的异同点及逻辑。最后,第五节讨论了 MASs 的未来研究方向和新兴趋势。