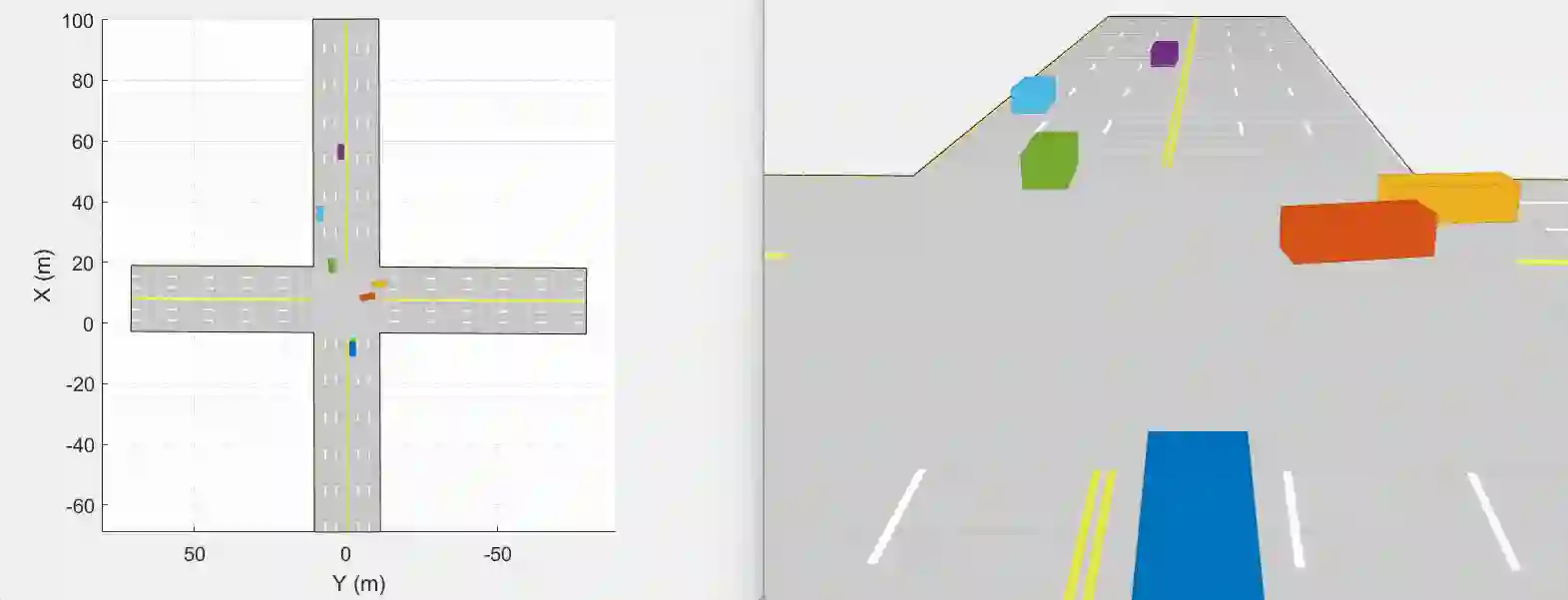
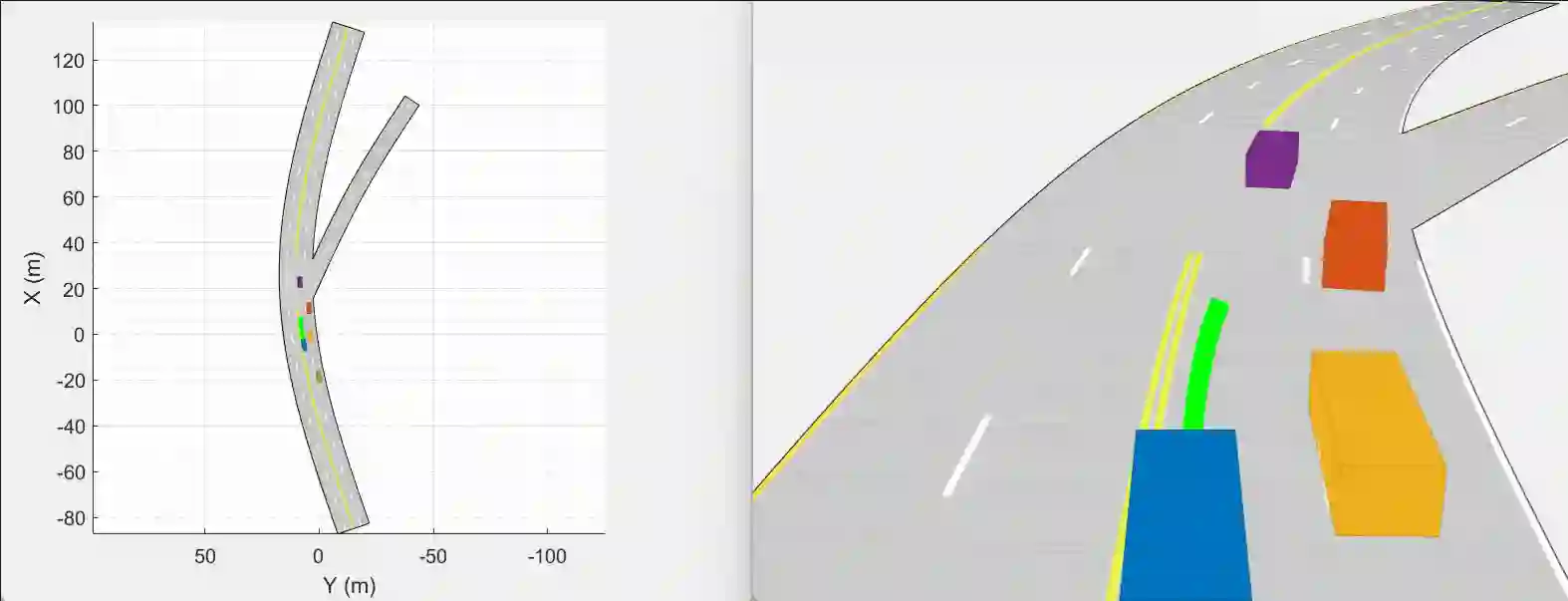
The integration of autonomous vehicles into urban and highway environments necessitates the development of robust and adaptable behavior planning systems. This study presents an innovative approach to address this challenge by utilizing a Monte-Carlo Tree Search (MCTS) based algorithm for autonomous driving behavior planning. The core objective is to leverage the balance between exploration and exploitation inherent in MCTS to facilitate intelligent driving decisions in complex scenarios. We introduce an MCTS-based algorithm tailored to the specific demands of autonomous driving. This involves the integration of carefully crafted cost functions, encompassing safety, comfort, and passability metrics, into the MCTS framework. The effectiveness of our approach is demonstrated by enabling autonomous vehicles to navigate intricate scenarios, such as intersections, unprotected left turns, cut-ins, and ramps, even under traffic congestion, in real-time. Qualitative instances illustrate the integration of diverse driving decisions, such as lane changes, acceleration, and deceleration, into the MCTS framework. Moreover, quantitative results, derived from examining the impact of iteration time and look-ahead steps on decision quality and real-time applicability, substantiate the robustness of our approach. This robustness is further underscored by the high success rate of the MCTS algorithm across various scenarios.
翻译:将自动驾驶汽车集成至城市和高速公路环境,需要开发稳健且适应性强的行为规划系统。本研究提出了一种创新方法,通过基于蒙特卡洛树搜索(MCTS)的算法来解决自动驾驶行为规划中的这一挑战。核心目标是利用MCTS固有的探索与利用平衡机制,在复杂场景中实现智能驾驶决策。我们引入了一种针对自动驾驶特定需求定制的MCTS算法,其核心在于将精心设计的成本函数(涵盖安全性、舒适性和可通过性指标)集成至MCTS框架中。通过使自动驾驶车辆能够在交通拥堵情况下实时导航交叉路口、无保护左转、切入和匝道等复杂场景,验证了本方法的有效性。定性实例展示了将变道、加速和减速等多种驾驶决策集成至MCTS框架的过程。此外,通过分析迭代时间和前瞻步数对决策质量及实时适用性的影响,定量结果进一步证实了本方法的鲁棒性,而MCTS算法在多种场景下的高成功率则突显了这种鲁棒性。