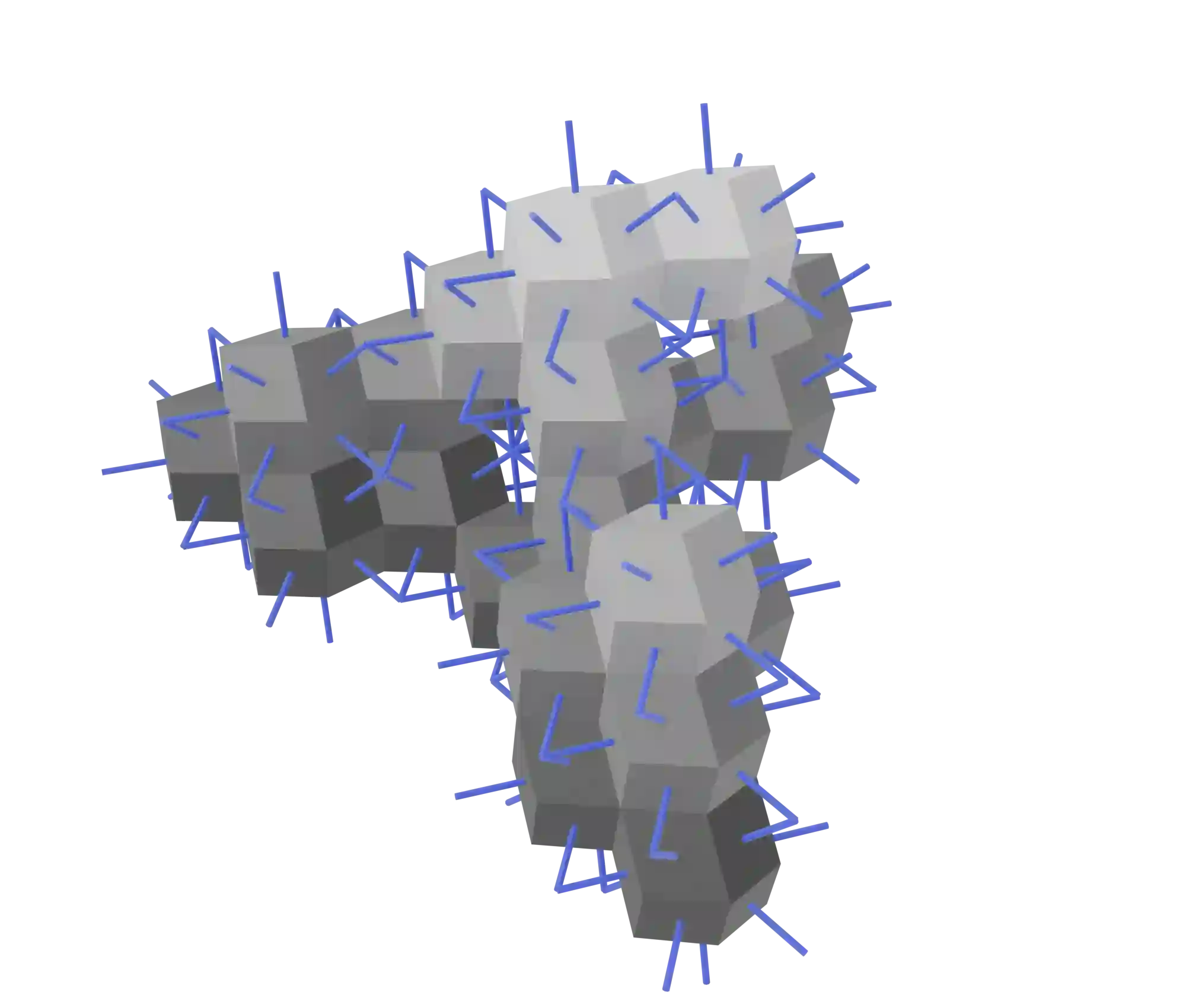
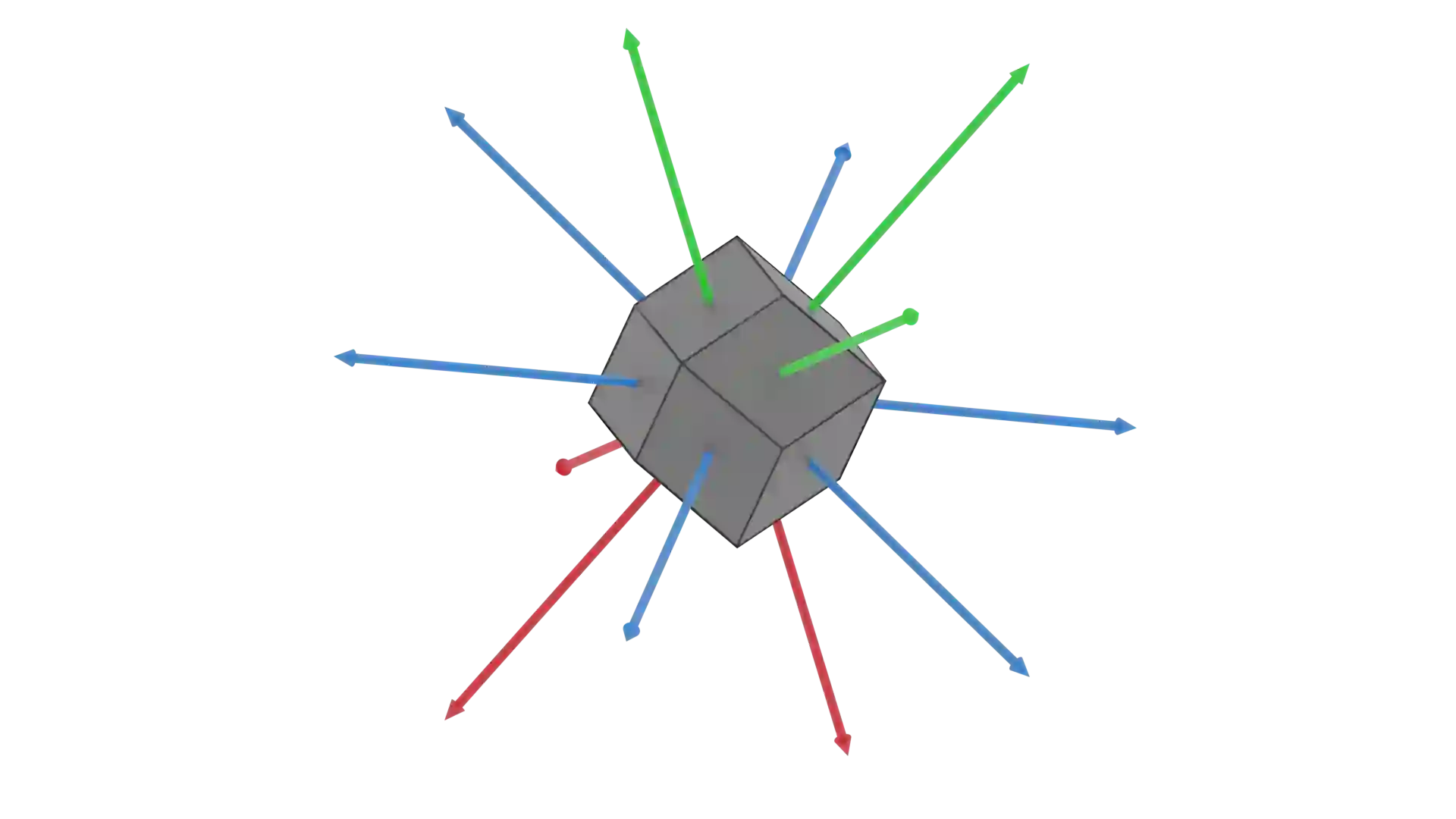
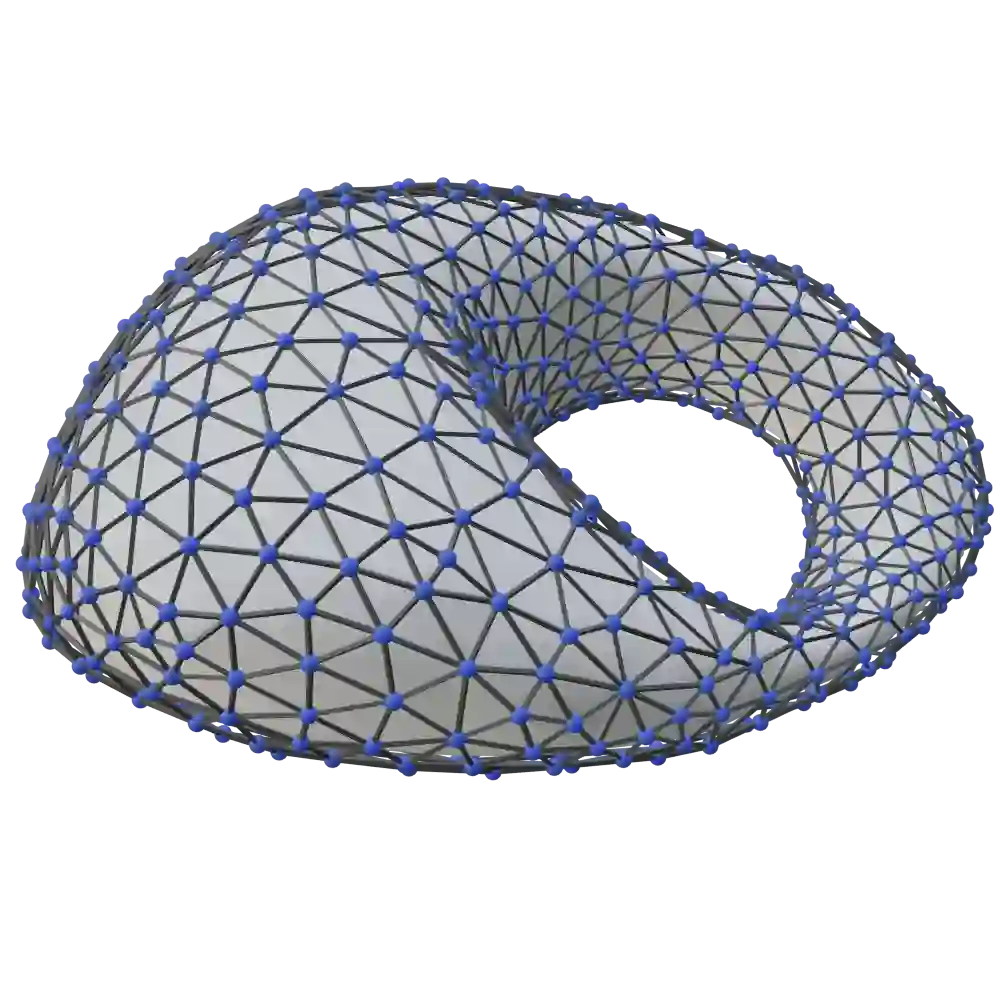
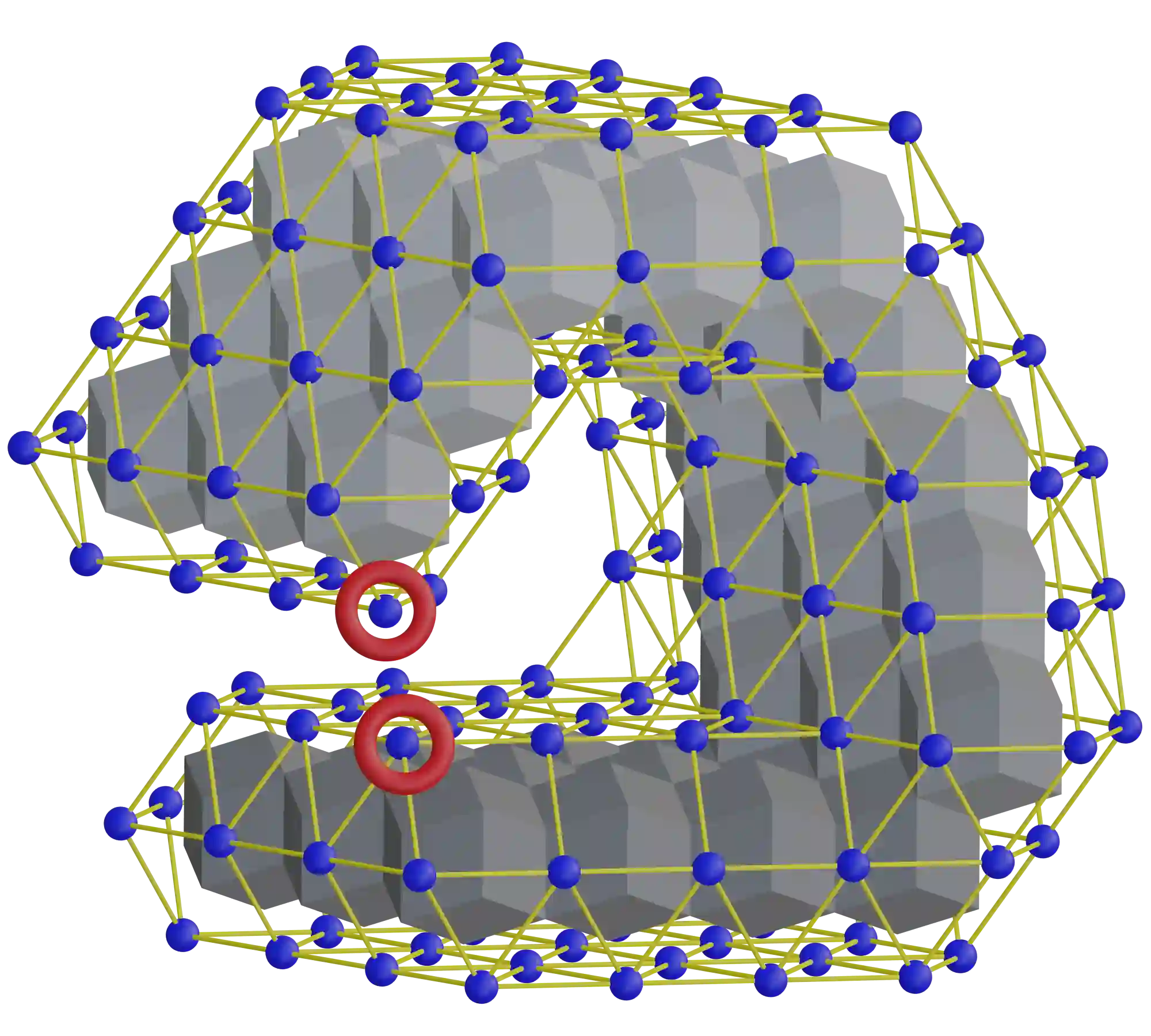
Motivated by the prospect of nano-robots that assist human physiological functions at the nanoscale, we investigate the coating problem in the three-dimensional model for hybrid programmable matter. In this model, a single agent with strictly limited viewing range and the computational capability of a deterministic finite automaton can act on passive tiles by picking up a tile, moving, and placing it at some spot. The goal of the coating problem is to fill each node of some surface graph of size $n$ with a tile. We first solve the problem on a restricted class of graphs with a single tile type, and then use constantly many tile types to encode this graph in certain surface graphs capturing the surface of 3D objects. Our algorithm requires $\mathcal{O}(n^2)$ steps, which is worst-case optimal compared to an agent with global knowledge and no memory restrictions.
翻译:受纳米机器人在纳米尺度辅助人类生理功能前景的启发,我们研究了混合可编程物质三维模型中的覆盖问题。在该模型中,单个具有严格有限视野范围和确定性有限自动机计算能力的智能体,可通过拾取、移动和放置无源瓦片来对其施加操作。覆盖问题的目标是填充大小为$n$的某个表面图中每个节点上的瓦片。我们首先在具有单种瓦片类型的受限图类上解决该问题,随后利用常数种瓦片类型将该图编码到能够刻画三维物体表面的特定表面图中。我们的算法需要$\mathcal{O}(n^2)$步,与具有全局知识且无内存限制的智能体相比,这是最坏情况下的最优复杂度。