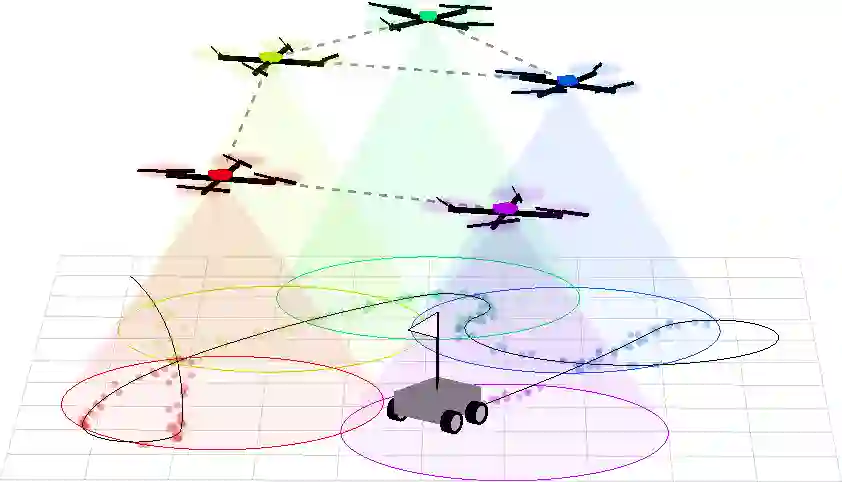
Distributed optimization provides a framework for deriving distributed algorithms for a variety of multi-robot problems. This tutorial constitutes the first part of a two-part series on distributed optimization applied to multi-robot problems, which seeks to advance the application of distributed optimization in robotics. In this tutorial, we demonstrate that many canonical multi-robot problems can be cast within the distributed optimization framework, such as multi-robot simultaneous localization and planning (SLAM), multi-robot target tracking, and multi-robot task assignment problems. We identify three broad categories of distributed optimization algorithms: distributed first-order methods, distributed sequential convex programming, and the alternating direction method of multipliers (ADMM). We describe the basic structure of each category and provide representative algorithms within each category. We then work through a simulation case study of multiple drones collaboratively tracking a ground vehicle. We compare solutions to this problem using a number of different distributed optimization algorithms. In addition, we implement a distributed optimization algorithm in hardware on a network of Rasberry Pis communicating with XBee modules to illustrate robustness to the challenges of real-world communication networks.
翻译:分布式优化为推导多机器人问题的分布式算法提供了框架。本教程是系列论文(共两部分)的第一部分,聚焦于多机器人问题中的分布式优化应用,旨在推动分布式优化在机器人领域的实际应用。在本教程中,我们证明了许多经典的多机器人问题(如多机器人同时定位与规划(SLAM)、多机器人目标跟踪以及多机器人任务分配问题)均可纳入分布式优化框架。我们识别出三大类分布式优化算法:分布式一阶方法、分布式序列凸规划以及交替方向乘子法(ADMM)。我们描述了每类算法的基本结构,并提供了代表性算法。随后,我们通过一个多架无人机协同跟踪地面车辆的仿真案例研究,比较了多种分布式优化算法对该问题的求解效果。此外,我们在由Raspberry Pi与XBee模块通信构成的硬件网络上实现了分布式优化算法,以验证其在真实通信网络挑战下的鲁棒性。