
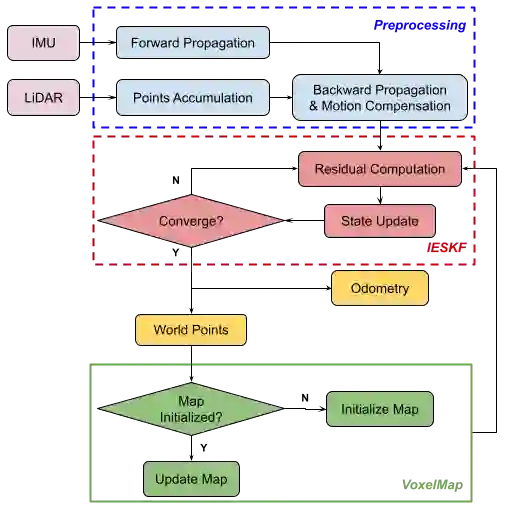
This note presents a concise mathematical formulation of tightly-coupled LiDAR-Inertial Odometry within an iterated error-state Kalman filter framework using a VoxelMap representation. Rather than proposing a new algorithm, it provides a clear and self-contained derivation that unifies the geometric modeling and probabilistic state estimation through consistent notation and explicit formulations. The document is intended to serve both as a technical reference and as an accessible entry point for a foundational understanding of the system architecture and estimation principles.
翻译:本技术说明在迭代误差状态卡尔曼滤波器框架下,使用VoxelMap表示法,提出了紧耦合激光雷达-惯性里程计的简明数学表述。本文并非提出新算法,而是通过一致的符号体系和显式表述,提供清晰且自洽的推导,从而统一几何建模与概率状态估计。本文档旨在同时作为技术参考资料,以及理解系统架构与估计原理的基础入门指南。
相关内容

最新内容
相关VIP内容
相关资讯