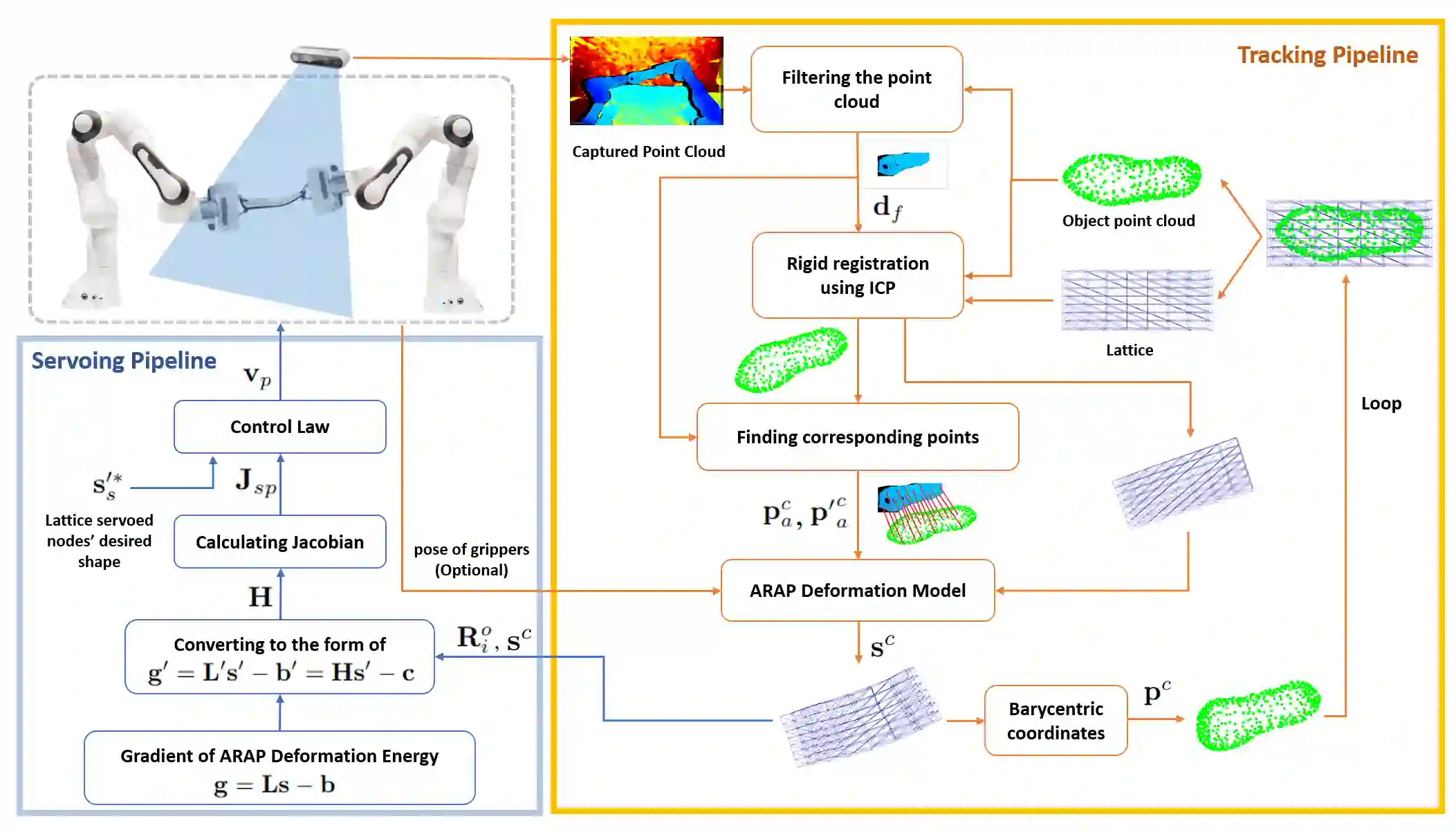
In this paper, we propose a general unified tracking-servoing approach for controlling the shape of elastic deformable objects using robotic arms. Our approach works by forming a lattice around the object, binding the object to the lattice, and tracking and servoing the lattice instead of the object. This makes our approach have full 3D control over deformable objects of any general form (linear, thin-shell, volumetric). Furthermore, it decouples the runtime complexity of the approach from the objects' geometric complexity. Our approach is based on the As-Rigid-As-Possible (ARAP) deformation model. It requires no mechanical parameter of the object to be known and can drive the object toward desired shapes through large deformations. The inputs to our approach are the point cloud of the object's surface in its rest shape and the point cloud captured by a 3D camera in each frame. Overall, our approach is more broadly applicable than existing approaches. We validate the efficiency of our approach through numerous experiments with deformable objects of various shapes and materials (paper, rubber, plastic, foam). Experiment videos are available on the project website: https://sites.google.com/view/tracking-servoing-approach.
翻译:在本文中, 我们提出一个通用的统一跟踪- 观察方法, 用于控制使用机器人臂控制弹性变形物体的形状。 我们的方法是围绕天体形成一个螺旋形, 将天体绑紧到天体上, 并跟踪和复制天体, 而不是天体。 这样, 我们的方法对任何一般形式的变形物体( 线形、 薄壳、 体积) 都有完全的 3D 控制。 此外, 它使天体的运行时间复杂性与天体的几何复杂度脱钩 。 我们的方法基于 As- Rigid- As- possib( ARAP) 变形模型。 它不需要该天体的机械参数, 并且能够通过大型变形来驱动天体。 我们的方法的输入是天体表面的点云, 以及每个框架的3D 相机所捕捉到的点云。 总体而言, 我们的方法比现有的方法更加广泛适用。 我们验证了我们的方法的效率, 我们的方法是通过不同形状和材料的变形物体进行无数的实验( 纸质/ 软体体/ 软体/ 实验性网站 。 。