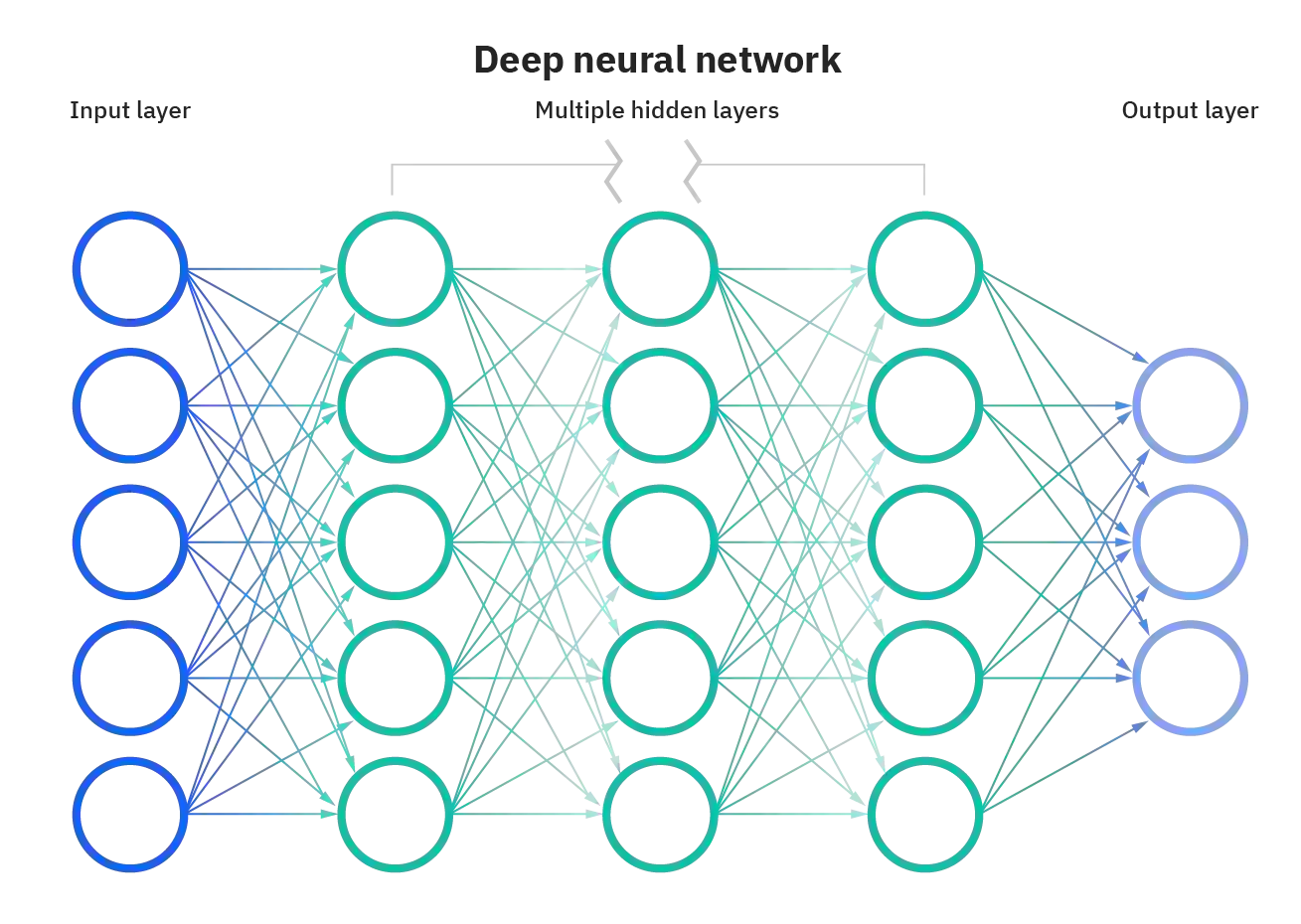
Autonomous systems are increasingly implemented using end-to-end learning-based controllers. Such controllers make decisions that are executed on the real system, with images as one of the primary sensing modalities. Deep neural networks form a fundamental building block of such controllers. Unfortunately, the existing neural-network verification tools do not scale to inputs with thousands of dimensions -- especially when the individual inputs (such as pixels) are devoid of clear physical meaning. This paper takes a step towards connecting exhaustive closed-loop verification with high-dimensional controllers. Our key insight is that the behavior of a high-dimensional controller can be approximated with several low-dimensional controllers. To balance the approximation accuracy and verifiability of our low-dimensional controllers, we leverage the latest verification-aware knowledge distillation. Then, we inflate low-dimensional reachability results with statistical approximation errors, yielding a high-confidence reachability guarantee for the high-dimensional controller. We investigate two inflation techniques -- based on trajectories and control actions -- both of which show convincing performance in three OpenAI gym benchmarks.
翻译:自主系统越来越多地采用基于端到端学习的控制器。此类控制器在真实系统上执行决策,其中图像是主要的感知模态之一,而深度神经网络构成此类控制器的基本构建模块。遗憾的是,现有的神经网络验证工具无法扩展至具有数千维度的输入——尤其是当单个输入(如像素)缺乏明确物理意义时。本文向连接穷举闭环验证与高维控制器迈出一步。我们的核心洞察在于:高维控制器的行为可通过若干低维控制器进行近似。为平衡低维控制器的近似精度与可验证性,我们利用最新的验证感知知识蒸馏技术。随后,我们通过统计近似误差对低维可控域结果进行膨胀,从而为高维控制器提供高置信度的可达性保证。我们研究了两种膨胀技术——基于轨迹和基于控制动作——两者在三个OpenAI gym基准测试中均展现出令人信服的性能。