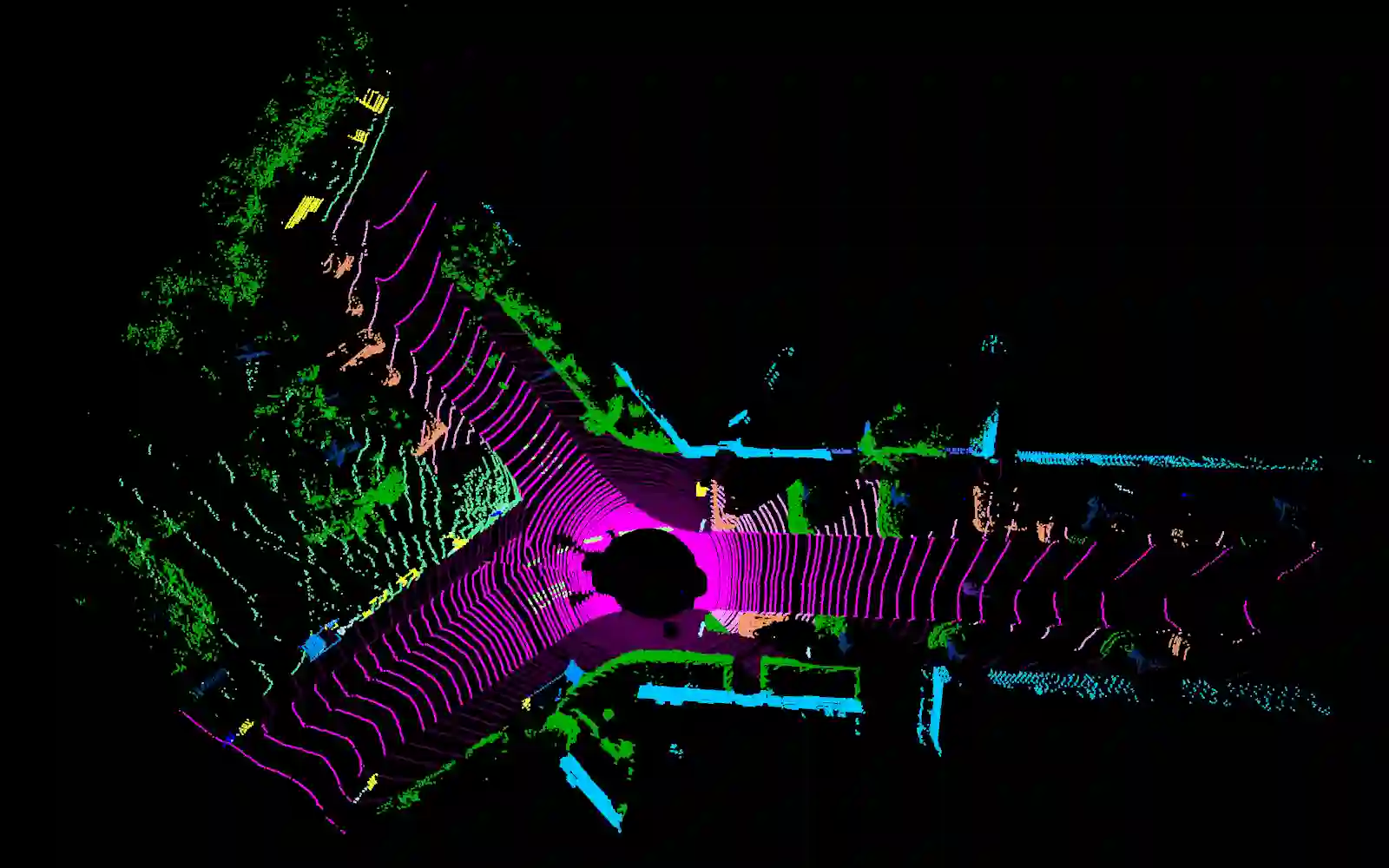
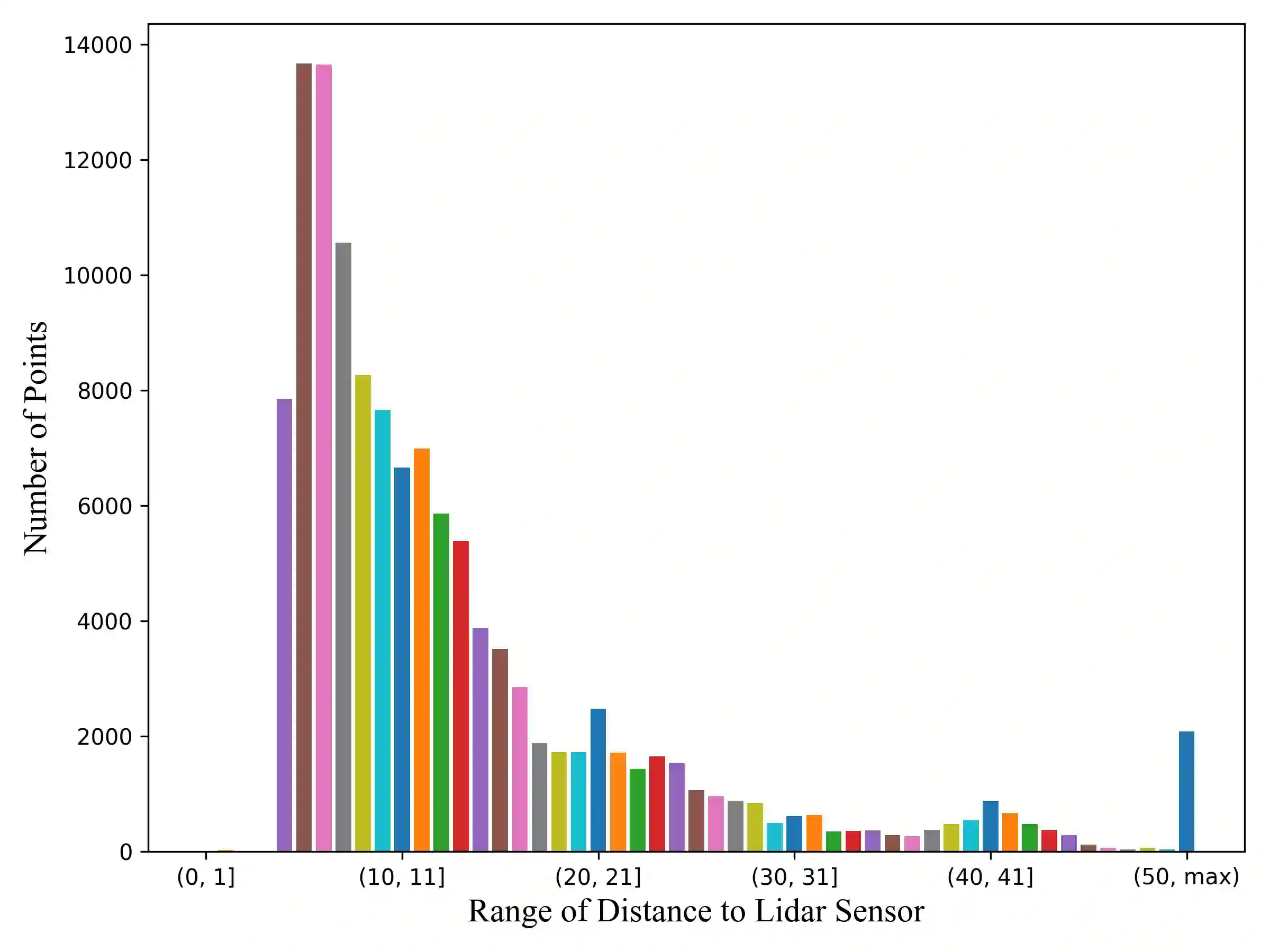
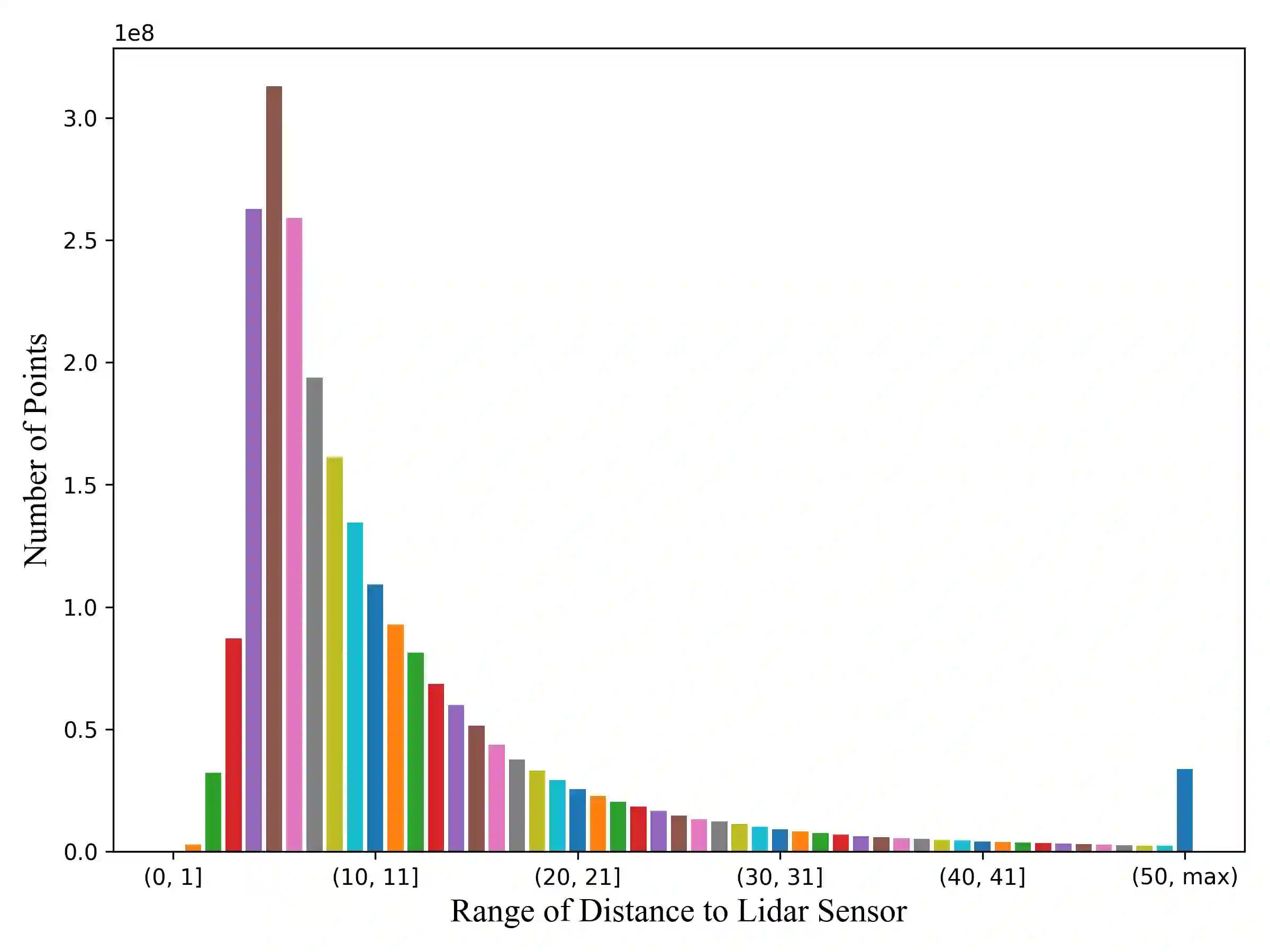
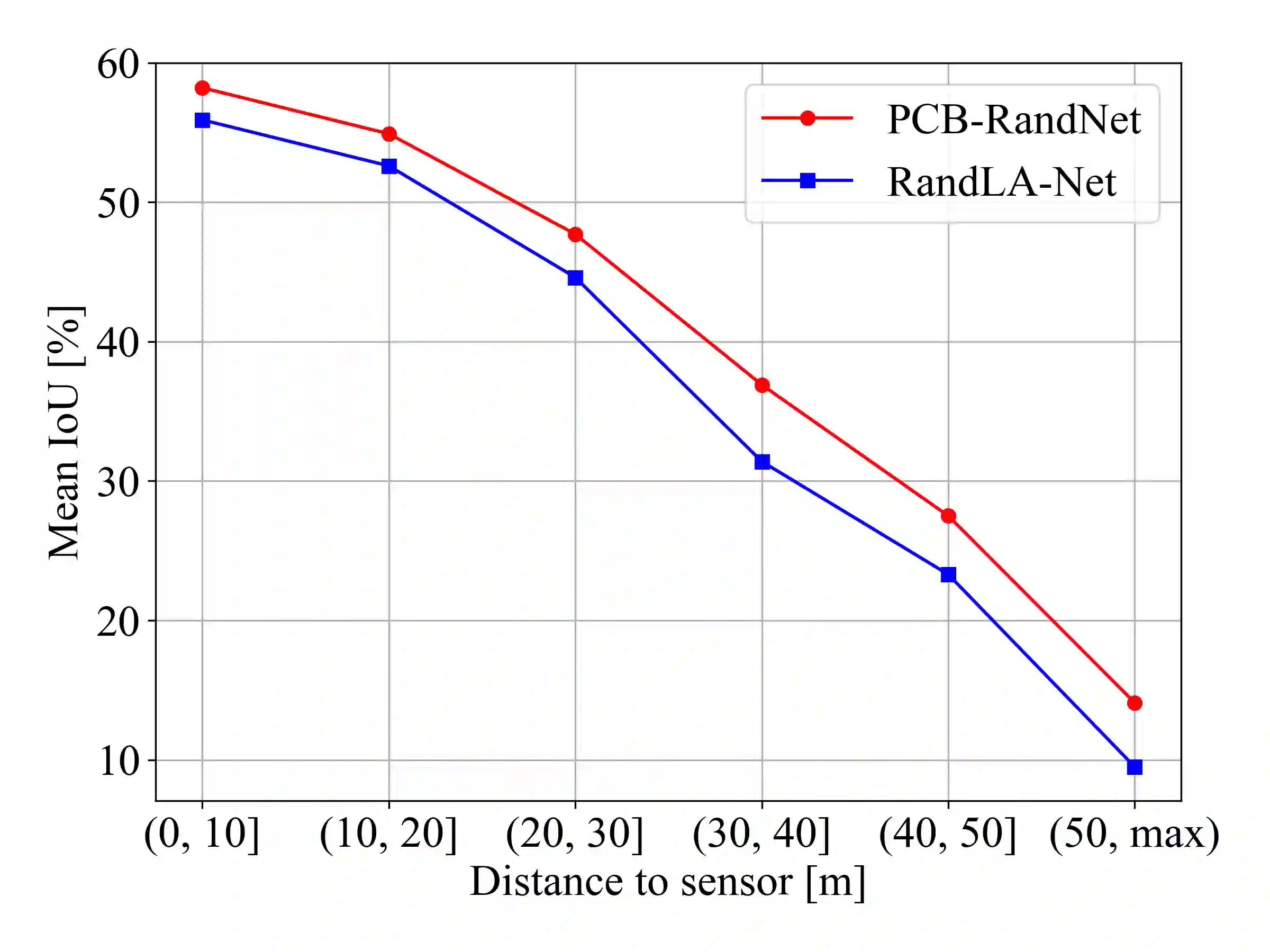
Fast and efficient semantic segmentation of large-scale LiDAR point clouds is a fundamental problem in autonomous driving. To achieve this goal, the existing point-based methods mainly choose to adopt Random Sampling strategy to process large-scale point clouds. However, our quantative and qualitative studies have found that Random Sampling may be less suitable for the autonomous driving scenario, since the LiDAR points follow an uneven or even long-tailed distribution across the space, which prevents the model from capturing sufficient information from points in different distance ranges and reduces the model's learning capability. To alleviate this problem, we propose a new Polar Cylinder Balanced Random Sampling method that enables the downsampled point clouds to maintain a more balanced distribution and improve the segmentation performance under different spatial distributions. In addition, a sampling consistency loss is introduced to further improve the segmentation performance and reduce the model's variance under different sampling methods. Extensive experiments confirm that our approach produces excellent performance on both SemanticKITTI and SemanticPOSS benchmarks, achieving a 2.8% and 4.0% improvement, respectively. The source code is available at https://github.com/huixiancheng/PCB-RandNet.
翻译:大规模激光雷达点云的快速高效语义分割是自动驾驶领域的基础性问题。为实现这一目标,现有的基于点的方法主要采用随机采样策略处理大规模点云。然而,我们的定量与定性研究发现,随机采样可能不适用于自动驾驶场景,因为激光雷达点在空间中呈现不均匀甚至长尾分布,这阻碍了模型从不同距离范围内的点中捕获足够信息,并降低了模型的学习能力。为解决该问题,我们提出一种新型极坐标圆柱平衡随机采样方法,使下采样后的点云保持更均衡的分布,并提升在不同空间分布下的分割性能。此外,我们引入采样一致性损失函数,以进一步改善分割性能并减少模型在不同采样方法下的方差。大量实验证明,我们的方法在SemanticKITTI和SemanticPOSS基准测试上均取得了优异性能,分别达到2.8%和4.0%的提升。源代码已开源至 https://github.com/huixiancheng/PCB-RandNet。