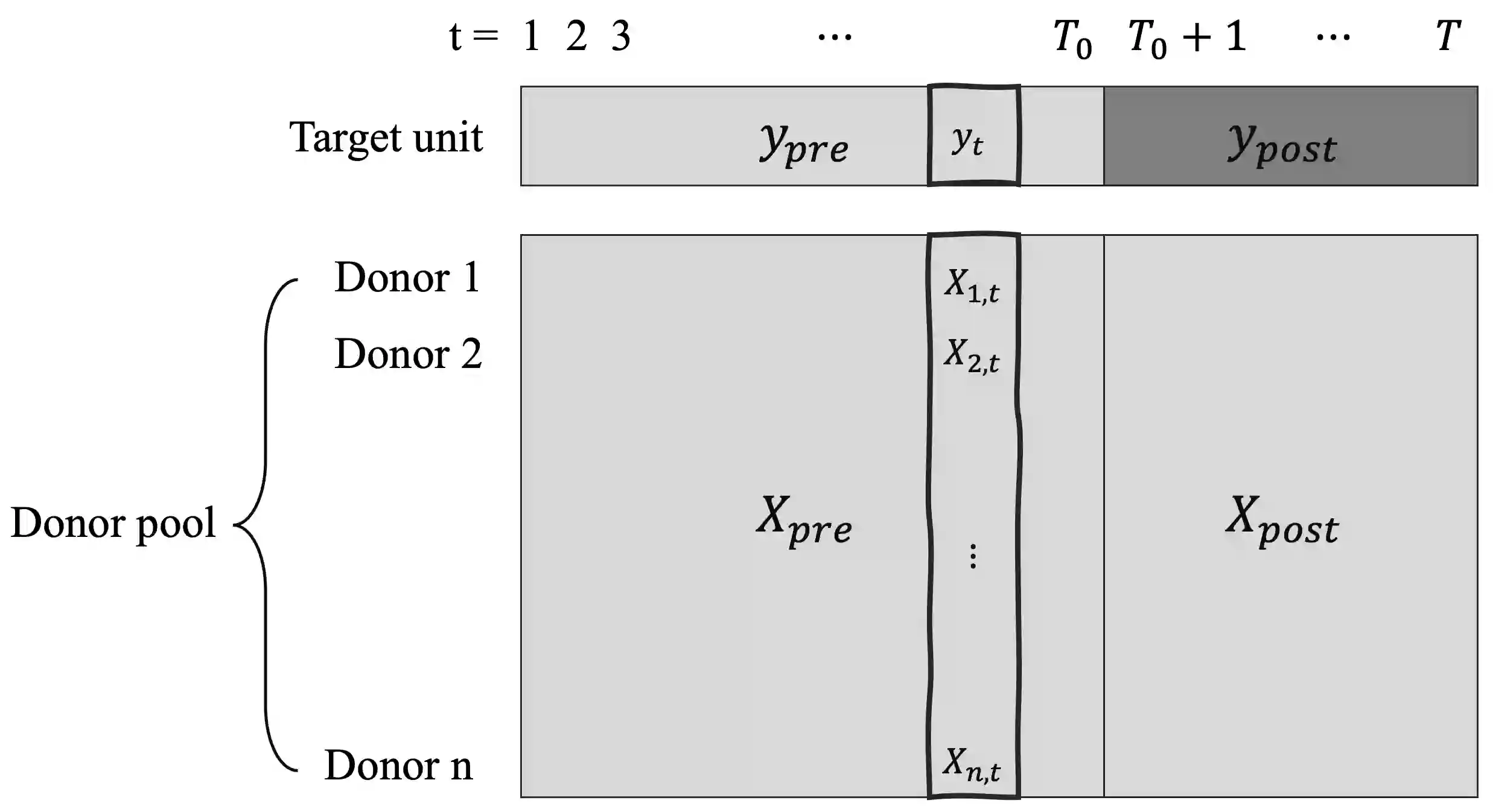
Synthetic control is a causal inference tool used to estimate the treatment effects of an intervention by creating synthetic counterfactual data. This approach combines measurements from other similar observations (i.e., donor pool ) to predict a counterfactual time series of interest (i.e., target unit) by analyzing the relationship between the target and the donor pool before the intervention. As synthetic control tools are increasingly applied to sensitive or proprietary data, formal privacy protections are often required. In this work, we provide the first algorithms for differentially private synthetic control with explicit error bounds. Our approach builds upon tools from non-private synthetic control and differentially private empirical risk minimization. We provide upper and lower bounds on the sensitivity of the synthetic control query and provide explicit error bounds on the accuracy of our private synthetic control algorithms. We show that our algorithms produce accurate predictions for the target unit, and that the cost of privacy is small. Finally, we empirically evaluate the performance of our algorithm, and show favorable performance in a variety of parameter regimes, as well as providing guidance to practitioners for hyperparameter tuning.
翻译:合成控制法是一种因果推断工具,通过创建合成反事实数据来评估某项干预的处理效应。该方法结合其他相似观测对象(即供体池)的测量数据,通过分析干预前目标单元与供体池之间的关系,预测感兴趣的反事实时间序列(即目标单元)。随着合成控制工具越来越多地应用于敏感或专有数据,通常需要形式化的隐私保护。在本研究中,我们首次提出具有显式误差界的差分隐私合成控制算法。我们的方法基于非隐私合成控制与差分隐私经验风险最小化的工具构建。我们给出了合成控制查询敏感性的上下界,并提供了隐私合成控制算法精度的显式误差界。研究表明,我们的算法能够为目标单元生成精确预测,且隐私成本较小。最后,我们通过实验评估了算法性能,验证了其在多种参数设置下的优越表现,并为实践者提供了超参数调优的指导。