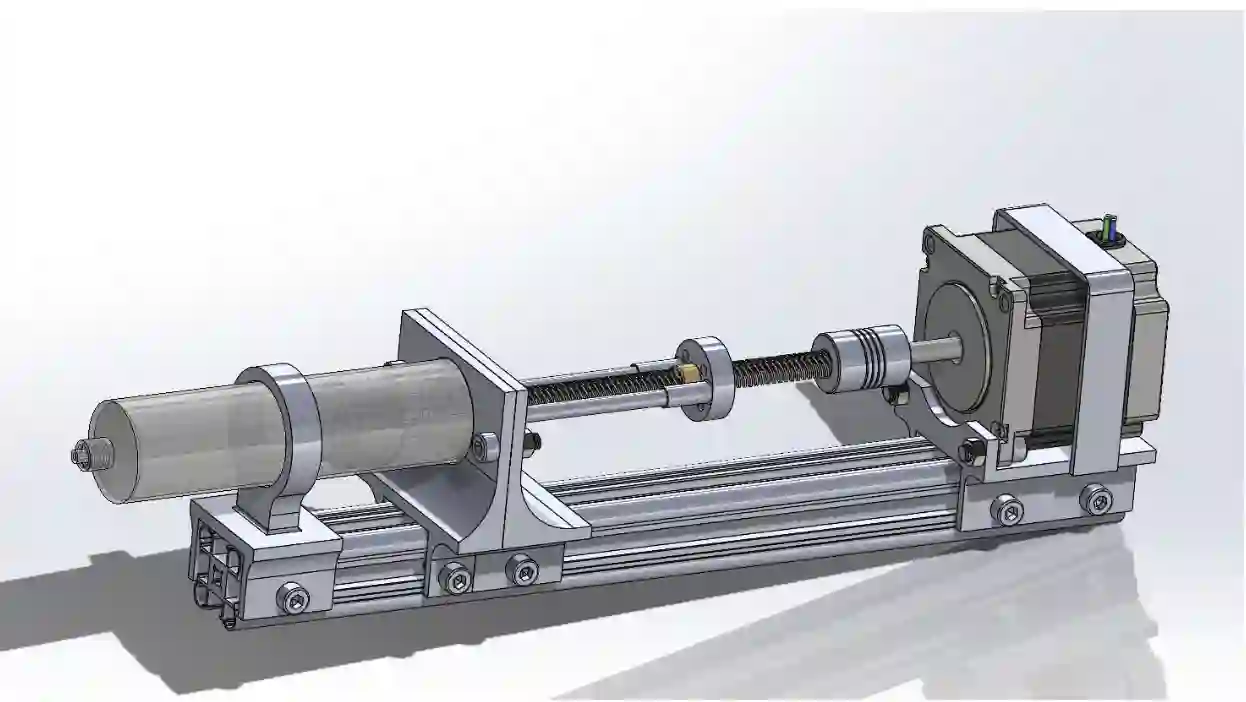
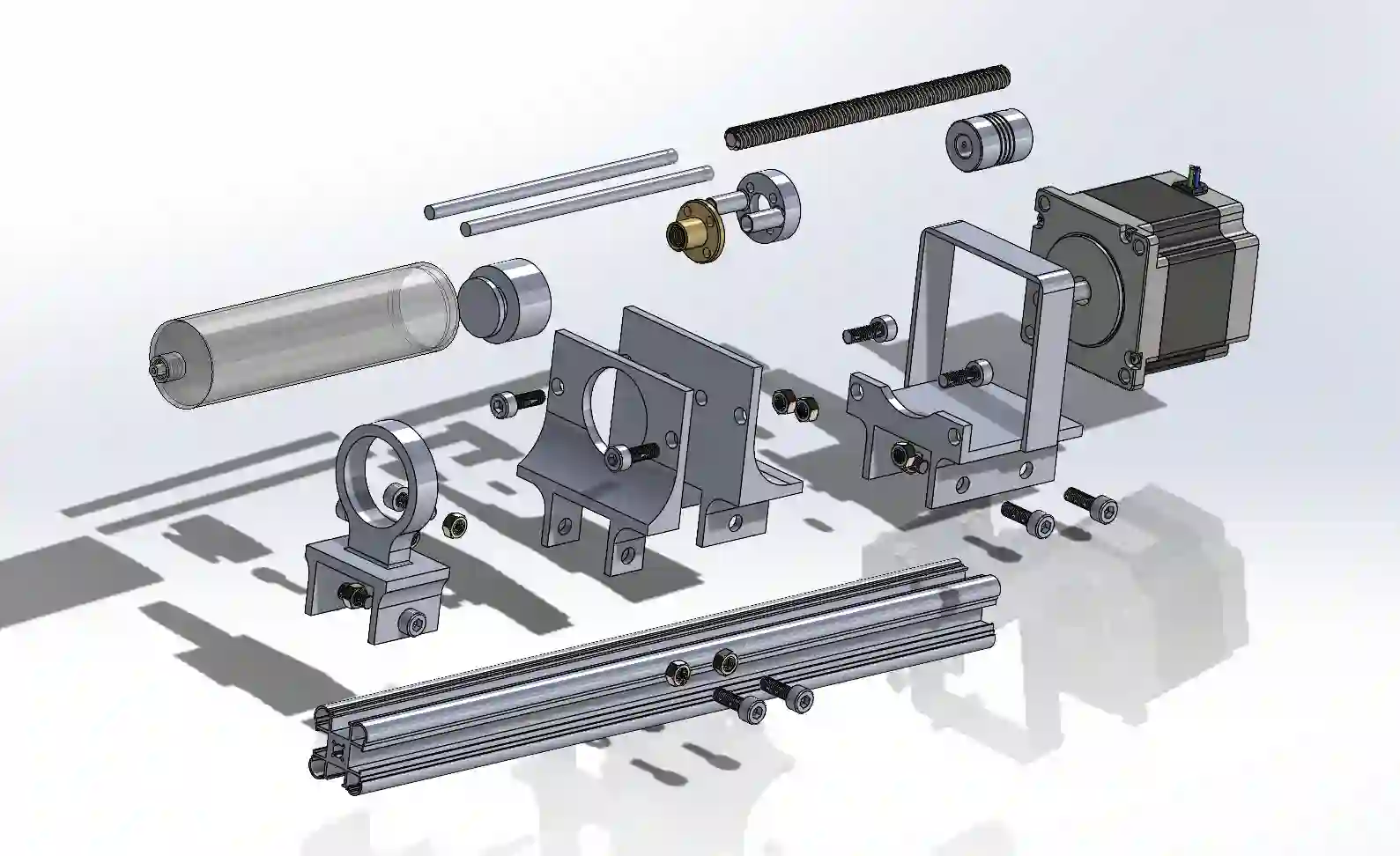
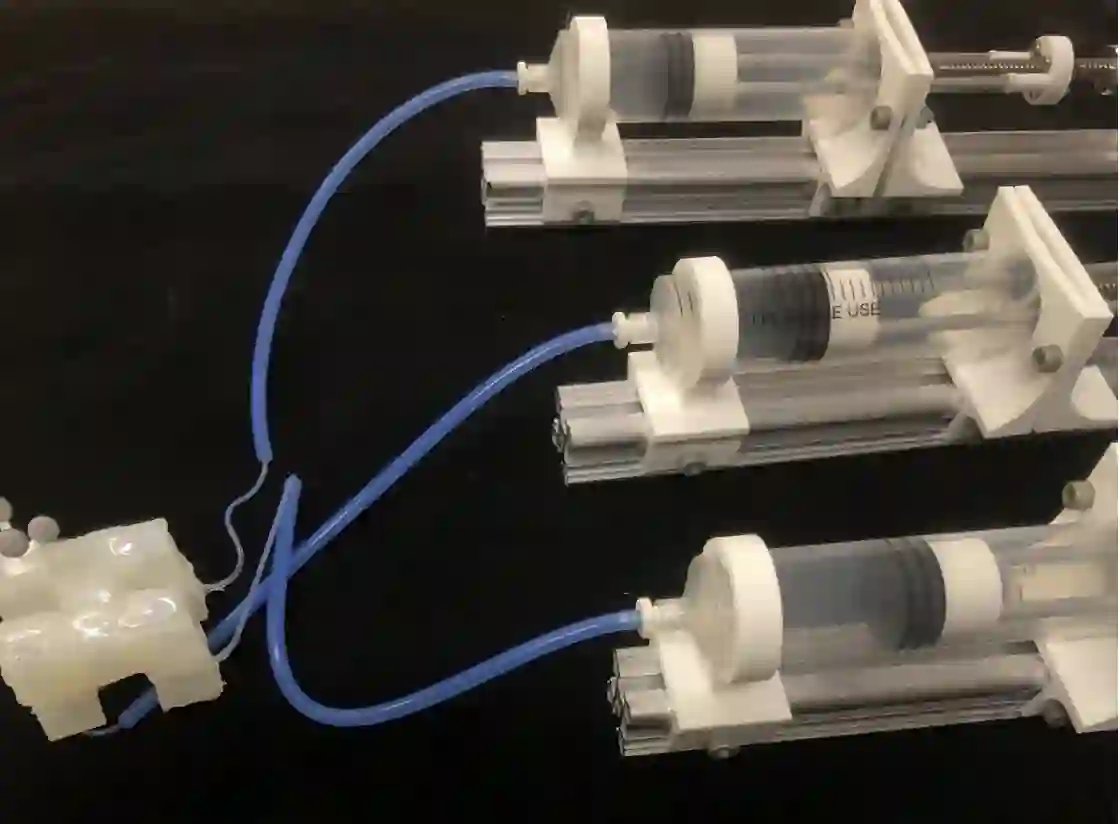
Soft robotics leverages deformable materials to develop robots capable of navigating unstructured and dynamic environments. Silicone Voxel-Based Soft Robots (Silibots) are a type of pneumatically actuated soft robots that rely on the inflation and deflation of their voxels for shape-shifting behaviors. However, traditional pneumatic actuation methods (high pressure solenoids, medical diaphragm pumps, micro compressors, compressed fluid) pose significant challenges due to their limited efficacy, cost, complexity, or lack of precision. This work introduces a low cost and modular syringe pump system, constructed with off the shelf and 3D printed parts, designed to overcome these limitations. The syringe pump system also enhances actuation with the unique ability to pull a vacuum as well pump air into the soft robot. Furthermore, the syringe pump features modular hardware and customizable software, allowing for researchers to tailor the syringe pump to their requirements or operate multiple pumps simultaneously with unique pump parameters. This flexibility makes the syringe pump an accessible and scalable tool that paves the way for broader adoption of soft robotic technologies in research and education.
翻译:软体机器人利用可变形材料开发能够适应非结构化动态环境的机器人。基于硅胶体素的软体机器人(Silibots)是一种气动驱动的软体机器人,其形态变换依赖于体素的充气与放气。然而,传统的气动驱动方法(高压电磁阀、医用隔膜泵、微型压缩机、压缩流体)因存在效能有限、成本高昂、结构复杂或精度不足等问题而面临重大挑战。本研究提出了一种低成本模块化注射泵系统,该系统采用现成部件与3D打印零件构建,旨在克服上述局限。该注射泵系统不仅可向软体机器人泵入空气,还具备抽真空的独特能力,从而增强了驱动性能。此外,该注射泵采用模块化硬件与可定制软件,使研究人员能够根据需求调整注射泵配置,或通过独立参数同时控制多个泵体运行。这种灵活性使注射泵成为一种易于获取且可扩展的工具,为软体机器人技术在科研与教育领域的广泛应用开辟了道路。