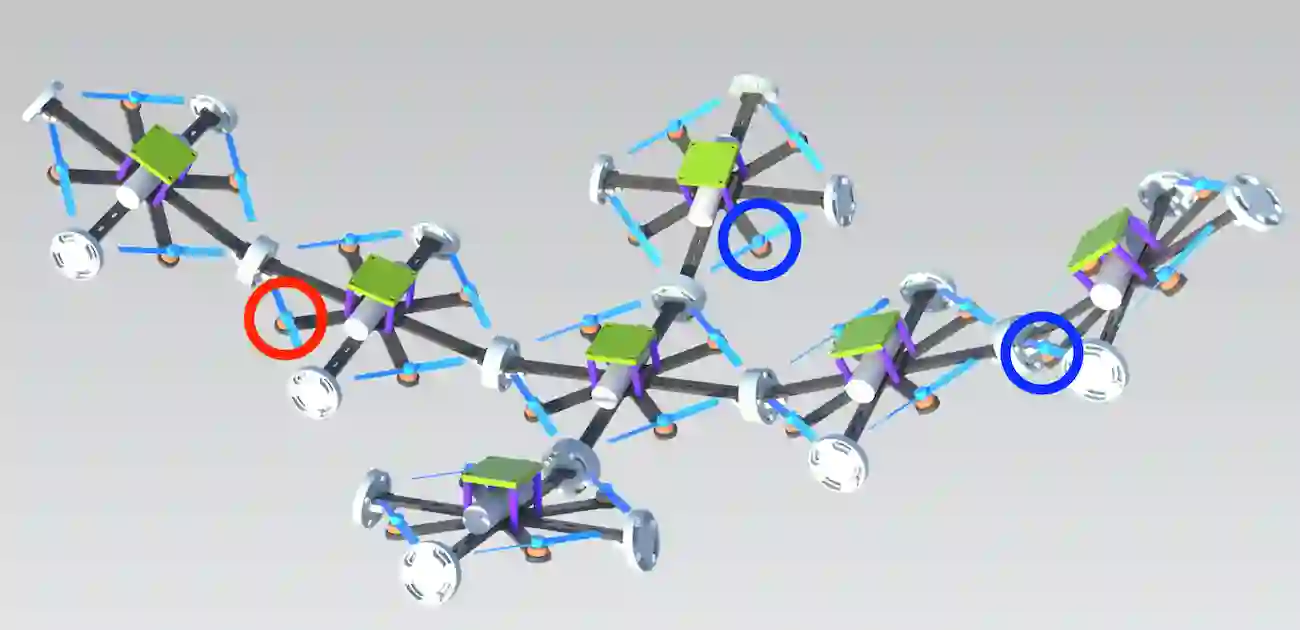
The standard quadrotor is one of the most popular and widely used aerial vehicle of recent decades, offering great maneuverability with mechanical simplicity. However, the under-actuation characteristic limits its applications, especially when it comes to generating desired wrench with six degrees of freedom (DOF). Therefore, existing work often compromises between mechanical complexity and the controllable DOF of the aerial system. To take advantage of the mechanical simplicity of a standard quadrotor, we propose a modular aerial system, IdentiQuad, that combines only homogeneous quadrotor-based modules. Each IdentiQuad can be operated alone like a standard quadrotor, but at the same time allows task-specific assembly, increasing the controllable DOF of the system. Each module is interchangeable within its assembly. We also propose a general controller for different configurations of assemblies, capable of tolerating rotor failures and balancing the energy consumption of each module. The functionality and robustness of the system and its controller are validated using physics-based simulations for different assembly configurations.
翻译:标准四旋翼是近几十年来最受欢迎且应用最广泛的飞行器之一,兼具卓越的机动性与机械简洁性。然而,欠驱动特性限制了其应用场景,尤其在需要产生六自由度期望力螺旋时。现有工作往往需要在机械复杂度与飞行系统可控自由度之间进行权衡。为充分发挥标准四旋翼的机械简洁性,本文提出一种名为IdentiQuad的模块化飞行系统,该系统仅由同构四旋翼模块组合而成。每个IdentiQuad可像标准四旋翼一样独立运行,同时支持根据任务需求进行模块化组装,从而提升系统可控自由度。各模块在组装结构中可互换。我们还针对不同组装构型提出了通用控制器,该控制器具备旋翼故障容错能力,并能平衡各模块能量消耗。通过基于物理引擎的不同组装构型仿真实验,验证了系统及控制器的功能性与鲁棒性。