教程题目:Multi-Agent Pathfinding: Models, Solvers, and Systems
教程简介:
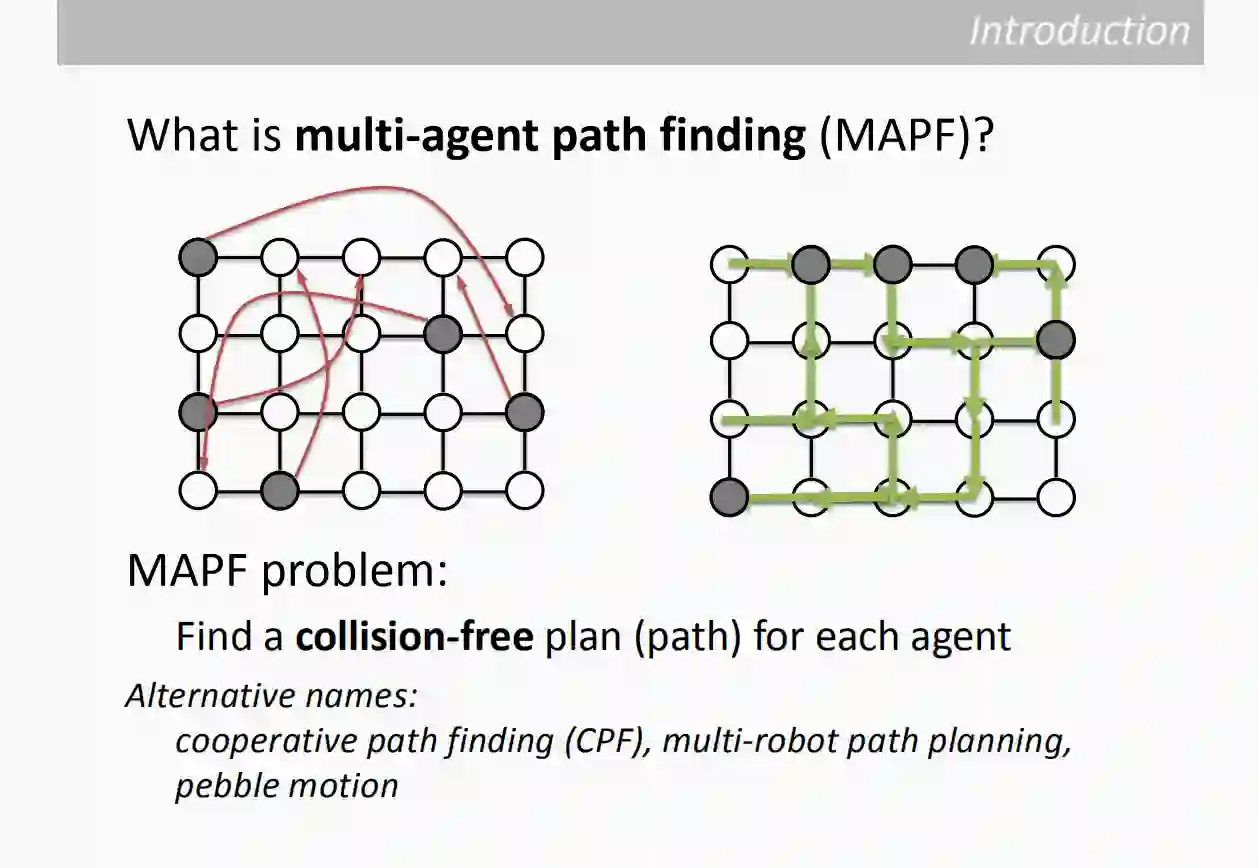
设计物理多代理系统时的一个基本任务是寻路:如何安全地将代理从一个位置移动到另一个位置。虽然可以在多项式时间内最优地解决单个智能体的寻路问题,但是多智能体的寻路困难得多。尽管如此,近年来在解决这个问题的实践中显示出了巨大的进步,使用了一系列不同算法方法的技术。在本教程中,将介绍解决多代理寻路问题(MAPF)的现有方法,讨论每种方法的优缺点,并概述该领域当前的挑战和机遇。还将演示MAPF和机器人内部物流系统。目标受众是任何对规划多个代理感兴趣的人。本教程的前提知识是启发式搜索、SAT和约束满足的基础知识。
组织者:
Roman Bartak是布拉格查尔斯大学的一名全职教授和研究员,在那里他领导着约束满足和优化研究小组。他的研究工作集中在约束满足和建模技术,以及它们在计划、调度和其他领域的应用。
Philipp Obermeier是德国波茨坦大学知识型系统组的博士生。他的科学兴趣集中在回答集编程(ASP)和动态域的声明性语言。
Torsten Schaub是德国波茨坦大学的教授。他目前的研究重点是答案集编程,并在potassco.org实现,这是开源项目Potassco捆绑软件用于答案集编程。
Tran Cao Son是美国新墨西哥州立大学的教授。他的主要研究兴趣集中在理论问题和知识表示和推理的实际应用,如答案集编程中的聚合、偏好和不完全信息的规划、多代理系统以及关于动作和变化的推理。
Roni Stern是本古里安大学软件和信息系统工程系的高级讲师。他的主要研究方向是启发式搜索、自动诊断、单智能体和多智能体自动规划。他还对人工智能在医疗领域的应用感兴趣。
教程ppt下载链接: 链接:https://pan.baidu.com/s/1GlrNS4LKrKyDCsfF2sqjKw 提取码:rujp