
海上特种作战部队在电磁辐射管制条件下执行小型船只作业时,需要具备无源反无人机系统能力。本研究旨在应对将异构商用传感器集成到统一的、与供应商无关的探测架构中的系统工程挑战。开发了一个名为“作战数据集成节点”的模块化融合框架,其采用基于插件的软件架构,能够快速集成来自多个制造商的射频、光电/红外、雷达和声学传感器。该系统在“第25-4次联合机构野外实验”和“2025勇敢机器”演习中进行了广泛测试;演示了在72小时内使用不同数据协议成功集成五种传感器类型的能力。野外测试实现了操作员显示界面干扰减少90%以上、两秒内完成从无源到有源传感器的提示,并能在4级海况条件下持续运行。该研究通过对组件故障的成功现场修复证明了其远征可维护性,并验证了与供应商无关的架构对于联盟互操作性的可行性。
本文采用系统化的工程方法,从需求分析、系统设计、实现到验证逐步推进,最终生成一个可工作的原型系统并对其性能特性进行全面分析。该研究方法结合了文献综述、需求分析、系统设计、原型开发和实验验证,以解决对海上无人机系统检测进行多传感器融合的理论理解和实际应用问题。第二章综合了关于无人机系统检测技术、多传感器融合架构和海上作战限制因素的现有研究,指出了当前认知的差距。第三章记录了根据作战需求得出的系统架构和集成决策。第四章介绍了来自北约演习的测试方法和实证结果。第五章分析了研究的意义、局限性以及后续研究建议。
第二章通过审视当前无人机系统检测方法、多传感器融合架构和海上作战限制因素,进行了全面的文献综述,为研究奠定了理论基础。此分析识别了当前认知的差距,并为系统设计决策奠定了技术基础。文献综述强调了海上作战面临的独特挑战,以及现有方法应用于特种作战部队任务需求时的局限性。
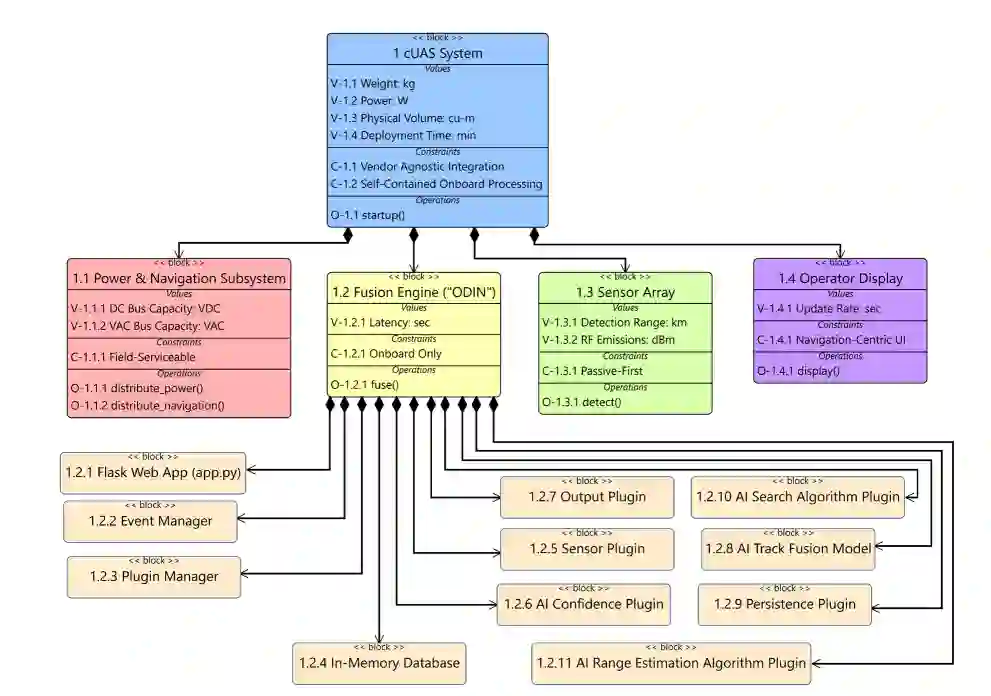
第三章详述了系统开发过程,包括需求分析、架构设计和组件选择决策,这些决策反映了通过文献综述和利益相关方分析确定的作战限制因素和性能要求。本章运用基于模型的系统工程原理,开发了一个全面的系统架构,以解决功能需求、接口定义和性能约束。该设计方法强调模块化、适应性和互操作性,以支持多样化的作战需求和联盟部署场景。
第四章展示了原型开发和野外测试的实验结果,包括在不同环境条件和作战场景下的性能分析。此分析为设计决策提供了实证验证,同时识别了性能局限性和系统改进机会。实验方法采用受控测试以分离单个性能因素,并结合模拟真实作战场景以捕捉系统组件与环境条件之间复杂的相互作用。
第五章综合研究发现,就多传感器融合方法对海上无人机系统检测的有效性得出结论,同时指明了未来研究和发展的方向。此分析既涉及技术性能特征,也涉及作战影响,为系统增强和能力发展提供了建议,以支持从研究原型向作战能力的转化。
