主要发现是什么?• U-Plan 的设计、开发与验证。U-Plan 是一个用于多架异构无人机系统(UAS)的协调、规划、实时监控与重规划的集成框架,能够应对真实世界的操作条件,包括无人机系统的运动学约束、风效应、空域约束,以及无人机系统、任务和环境条件的动态变化。
主要发现的含义是什么?• U-Plan 及其组件与专业级的 Visionair 地面控制站(GCS)软件和 VECTOR-SIL 软件在环自动驾驶仪模拟器集成后进行了验证,并与现有主要方法进行了比较,结果显示其在应对动态变化时具有显著的效能、效率、可扩展性和实时适应性。
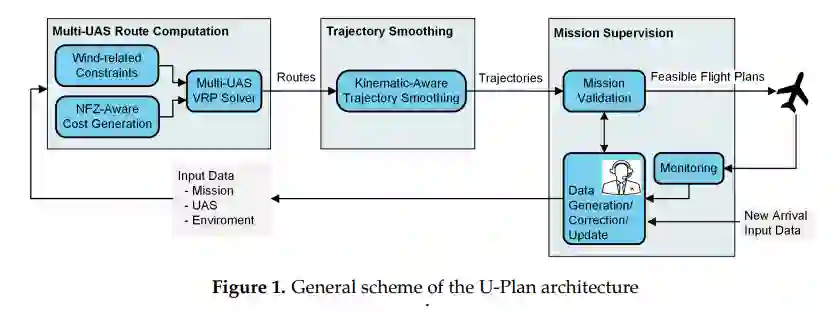
尽管目前已有大量成功的用于多无人机系统(UAS)集群规划的现有方法和框架,但仍然缺乏能够应对真实世界操作条件的协调框架。本文提出了 U-Plan,一个用于多无人机系统任务协调的集成管理框架。U-Plan 旨在规划、调度、监控和重新规划一组异构的无人机系统,以完成访问兴趣点(PoIs)的任务,同时确保所有生成的轨迹是安全、可行的,并且符合要求的兴趣点到达时间、无人机系统运动学与能量约束以及现有的三维禁飞区(NFZs)。U-Plan 被设计为适用于强动态任务的实用工具,并建立在三个核心组件之上:1) 一种禁飞区感知的航线计算方法,该方法在车辆路径问题(VRP)优化之前明确考虑禁飞区,从而生成更短的禁飞区安全航线;2) 一个轨迹规划模块,确保为固定翼无人机系统生成运动学可行的轨迹;以及 3) 一个任务监管模块,用于在无人机系统、任务、风速或空域限制发生变化时进行实时监控和重规划。该框架通过与专业级的 Visionair 地面控制站软件和 VECTOR-SIL 软件在环模拟器接口对接得以实现和验证,该模拟器真实地复现了经过认证的固定翼自动驾驶仪在各种天气条件下的行为。验证结果表明,U-Plan 能够高效满足复杂的任务要求,并具有很强的可扩展性。由于其高计算效率,U-Plan 支持在线任务重规划,使得无人机系统集群能够无缝适应真实世界操作场景中典型的变化。
这项工作的主要贡献包括:
- U-Plan,一个用于复杂动态多无人机系统任务的协调、规划、监控与重规划的多无人机系统管理框架;
- 多无人机系统管理方法:(i)禁飞区感知的航线分配,在车辆路径问题优化之前明确考虑禁飞区,从而生成更短的禁飞区安全航线;(ii)确保生成短且运动学可行的轨迹的轨迹规划;以及(iii)任务监督与监控;
- 在真实的多无人机系统任务中验证 U-Plan(及其组件),并与商业产品 VECTOR-SIL 和 Visionair GCS 软件进行接口对接。
本工作的后续内容安排如下。第 2 节总结了主要的相关工作。第 3 节描述了所解决问题的表述以及提出的 U-Plan 框架的设计。第 4 节介绍了用于实现 U-Plan 组件和方法的方法。第 5 节对所提出的各个方法以及完整的 U-Plan 框架进行了广泛的验证。最后,第 6 节总结了结论和主要的未来工作。