
随着机器人持续变得更加复杂,需要能够与其他机器人及人类队友互动和协作的机器人。设想的机器人是专为与其他智能体(无论是机器人还是人类)协作而设计的。这一愿景带来了诸多挑战,本论文特别聚焦于探索不同层次的智能体间交互与推断的队友信息。
首先在协作导航的范畴内探索单人类-单机器人组队,这需要直接的人机交互与推断的队友信息。考虑这样一种情况:一个人类和一个机器人必须在环境中导航以到达一个共同目标。提出了两种不同的触觉导引系统,通过力反馈为人类用户提供防撞和路径建议。每种方法在计算量和最优性方面各有优势。分析与实验结果表明,本文方法能同时保证防撞和向目标导引。
虽然这第一项工作处理的是双智能体协作,但本论文的其余部分聚焦于多智能体协作,其中机器人与人类的交互很少,且队友信息层次不同。考虑一个异构多智能体团队,即每个机器人具有不同的能力,例如感知或资源容量。本文提出了部署机器人以服务复杂动态任务的控制策略,使团队能够适应任务和团队内部的变化。分布式方法支持大规模应用。分析表明,本文方法在适应动态环境的同时收敛于最优解,仿真和硬件实验显示其性能与基线算法相当。
本文探索了一系列多样化的协作自主系统,涵盖从人机协作到多智能体团队协作。具体而言,首先在第三章研究了人机协作导航,通过力反馈提供防撞和沿建议路径的导引。该方法探索了高层次的智能体间交互与推断的队友信息。接着,在第四章中,考虑了一个多机器人团队在协作资源交付场景中的应用,该团队拥有关于队友的完整信息,但智能体间交互很少。最后,在第五章中,放宽了关于队友信息的假设,机器人通过观察队友来调整其交付行为。
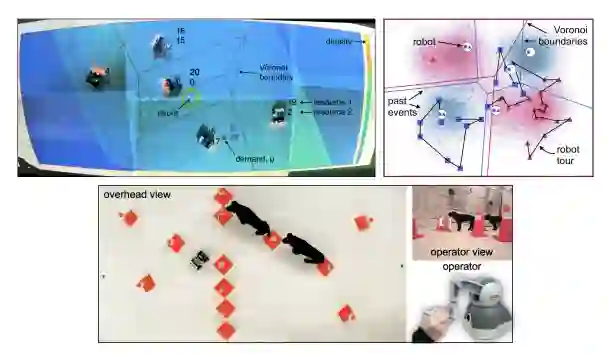
图1·2: 本文研究了三种不同形态的协作自主系统。在第4、5章探讨了多智能体团队协作(上图),并在第3章研究了人机协作导航(下图)。
成为VIP会员查看完整内容
相关内容


最新内容
相关VIP内容
相关资讯