
本报告为美国海军研究生院发布的技术报告,旨在研究利用人工智能(AI)框架优化高功率微波(HPM)系统对抗自主无人机蜂群的战术。
一、 研究背景与核心目标
- 研究基础:本研究基于海军研究生院先前在对抗性蜂群交战动态建模与优化方面的工作,旨在解决实现基于强化学习(RL)的分布式神经网络(NN)防御控制器的三个关键子问题。
- 核心目标:开发一种生成式AI框架,能够在给定更抽象目标的情况下,生成分布式控制器,以指导单个机动防御平台(如搭载HPM的卡车或无人机)的移动位置和方式。报告指出,此处的“生成式AI”通常指强化学习(RL)。
- 关键挑战与思路:
- RL的成功高度依赖于精心设计的奖励函数,而非简单的最终二元结果(成功/失败)。
- 解决问题的层次结构包括:设计良好的目标函数、构建处理反蜂群问题的RL训练框架、以及实现能够根据交战局部状态信息指导防御方的抗噪声NN控制器。
- 一个成功的框架还需包含对敌方(红方)行为的分类能力,并将此信息输入防御蜂群(蓝方)的NN控制器。
二、 三个核心子项目的研究内容与发现
- 项目1:构建稳健的RL奖励函数
- 研究内容:对要地防御(HVU)反蜂群场景进行权衡分析,比较两种目标分配算法在不同蜂群特性下的相对效能。
- 算法A(拦截算法):优先防御HVU,即始终优先摧毁对HVU当前威胁最大的攻击者。
- 算法B(匈牙利算法):优先高效摧毁攻击者,而不考虑哪个攻击者对基地(HVU)威胁最大。
- 核心发现:
- 决定两种算法优劣的主导因素是攻击者与防御者的速度比。
- 当防御者速度更快时,“拦截算法”(优先保护HVU)效果最佳。
- 当攻击者速度更快时,“匈牙利算法”(优先高效摧毁攻击者)在HVU生存率上结果更好。此结果有些反直觉,表明在某些情况下,不直接考虑对HVU的威胁反而能提高HVU生存几率。
- 研究意义:为RL框架的奖励函数设计提供了关键见解,表明简单地考虑与HVU生存这一最终目标相关的指标是不够的。
- 项目2:基于NN的反蜂群控制器的特征工程
- 研究内容:使用监督学习开发基于NN的控制器,以指导单个防御者的行动。研究通过特征工程,探索何种数据能最高效地输入NN,以稳定预测防御者的预设航向角。
- 核心发现:
- 特征工程至关重要:最有效的特征工程方案涉及“潜在拦截”特征,该特征明确求解了防御者应飞往何处以拦截攻击者的几何问题。
- 必须考虑时间序列信息:研究发现,将上一时间步的防御者加速度(即航向角,也是NN的输出)作为输入,能使控制器结果非常稳定,性能几乎与用于训练NN的基础算法相当。如果不输入上一时间步的航向角,则会出现不稳定性,导致航向角反复切换,性能下降。报告指出,这也可以通过使用明确包含时间序列信息的NN架构(如卷积神经网络)来实现。
- 项目3:敌方战术分类
- 研究内容:建立监督神经网络时间序列分类(NN TSC)框架,以快速准确识别蜂群自主智能体所使用的战术和底层算法。研究重点在于通过数据集增强提升分类器鲁棒性,并通过优化防御者轨迹来提升NN预测精度。
- 核心方法与发现:
- 数据集增强:通过引入防御者数量、防御者运动模式、测量噪声等关键变量的系统性变化,创建了丰富的增强数据集(如Comb ND, Comb DM, Comb Noise)。实验表明,在“组合”数据集上训练的鲁棒NN模型表现始终优于其他模型,即使在防御者数量显著减少的情况下也能保持高精度,显著提升了NN的泛化能力和操作适应性。
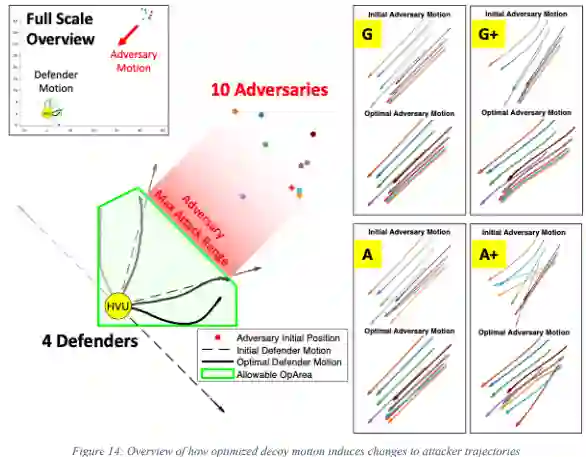
- 优化防御者轨迹:开发了一个部署框架,通过战略性地设计防御者轨迹,以可预测的方式影响敌方行为,从而最大化NN分类准确率,同时遵守空域限制等操作约束。研究表明,优化的防御者运动能持续提升NN的预测精度,并且“星形”或“半星形”初始轨迹是最有效的启发式方法。此外,研究还证明,通过采用优化的防御者运动,可以最大限度地减少所需的防御者数量,为操作规划者提供了基于“最佳STP@ND”估计的决策工具,以选择最优的防御者数量和初始轨迹来满足分类性能阈值要求。
三、 总结
报告总结在实现项目总体目标(即开发能够生成分布式NN控制器以高效击败攻击蜂群的RL框架)方面取得了重要进展:
- 明确了攻防双方速度比是选择优先保护HVU还是优先摧毁攻击者的关键因素,这对RL奖励函数设计具有重要意义。
- 阐明了特征工程和必要输入对于稳定、可部署的NN控制器的重要性。
- 展示了一个用于训练NN分类器以支持蜂群防御系统的鲁棒框架。该方法侧重于通过用广泛的操作场景(包括防御者数量、运动模式和噪声水平的变化)丰富训练数据集来增强NN性能。结果表明,暴露于多样化条件显著提高了NN的灵活性和可靠性。该分类器在不断变化的战术环境中保持高精度,即使在防御者较少的情况下也能有效运行,突出了其对资源有限或不可预测情况的适应性。
成为VIP会员查看完整内容
相关内容


最新内容
相关VIP内容
相关资讯