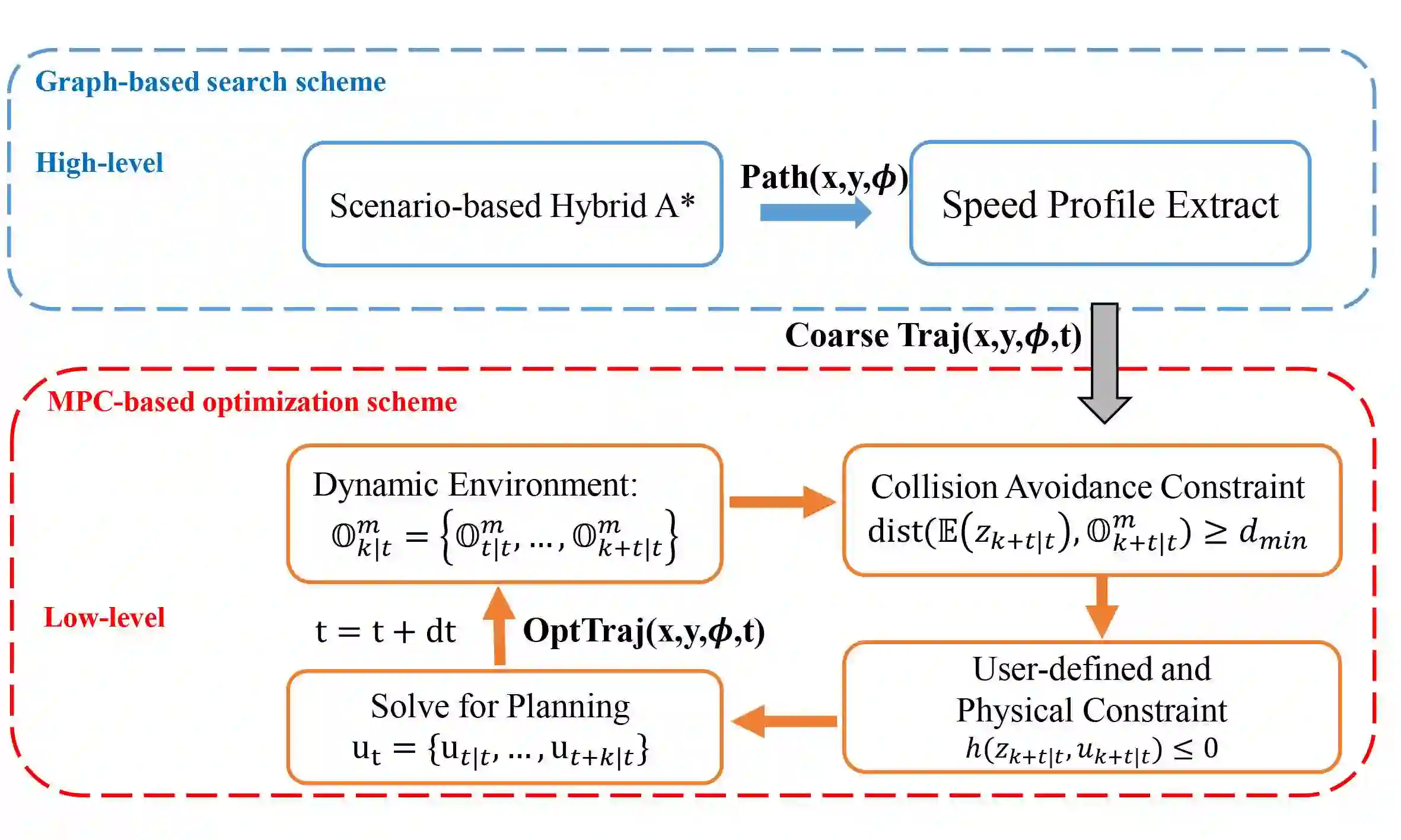
This paper introduces a hierarchical framework that integrates graph search algorithms and model predictive control to facilitate efficient parking maneuvers for Autonomous Vehicles (AVs) in constrained environments. In the high-level planning phase, the framework incorporates scenario-based hybrid A* (SHA*), an optimized variant of traditional Hybrid A*, to generate an initial path while considering static obstacles. This global path serves as an initial guess for the low-level NLP problem. In the low-level optimizing phase, a nonlinear model predictive control (NMPC)-based framework is deployed to circumvent dynamic obstacles. The performance of SHA* is empirically validated through 148 simulation scenarios, and the efficacy of the proposed hierarchical framework is demonstrated via a real-time parallel parking simulation.
翻译:本文提出了一种分层框架,该框架融合了图搜索算法与模型预测控制,旨在促进自主车辆在受限环境中实现高效的泊车操作。在高层规划阶段,该框架采用基于场景的混合A*算法(SHA*)——这是传统混合A*的一种优化变体——用于在考虑静态障碍物的同时生成初始路径。该全局路径为低层非线性规划问题提供了初始猜测。在低层优化阶段,部署了基于非线性模型预测控制(NMPC)的框架以规避动态障碍物。通过148个仿真场景对SHA*的性能进行了实证验证,并通过实时平行泊车仿真展示了所提出的分层框架的有效性。