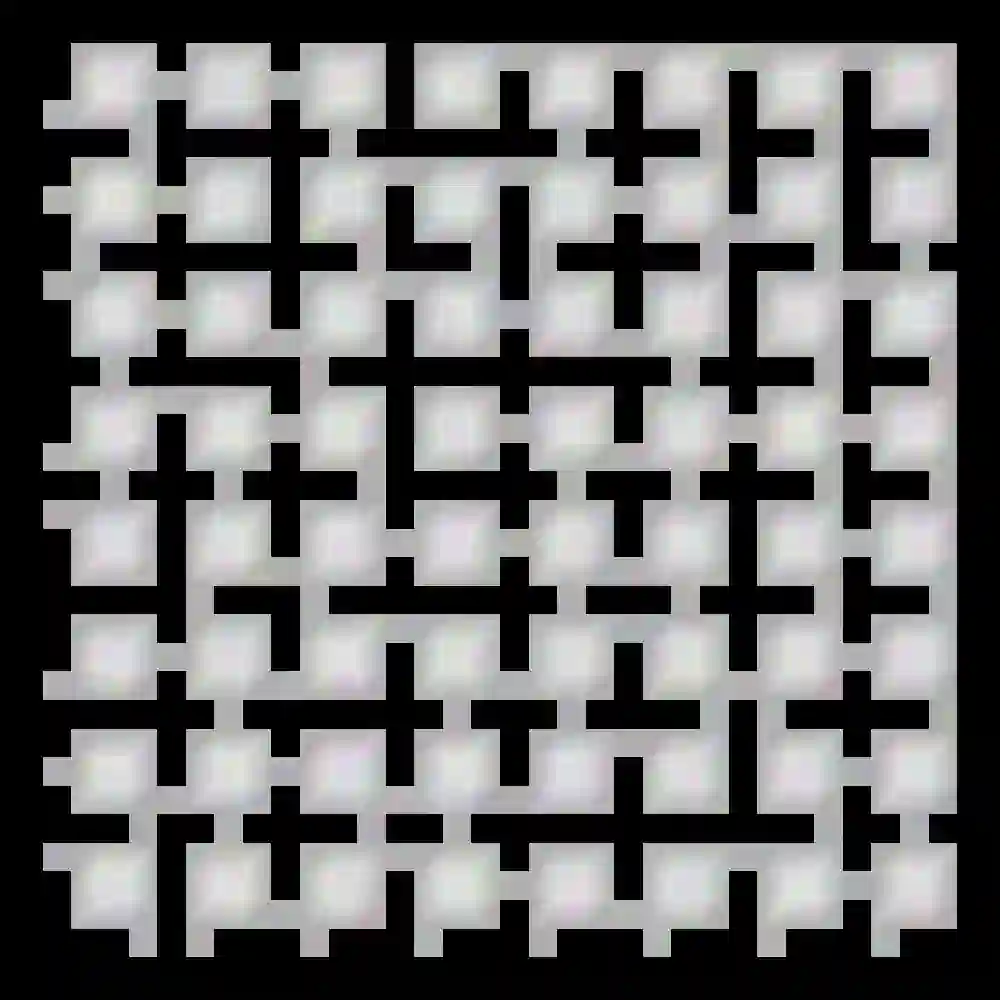
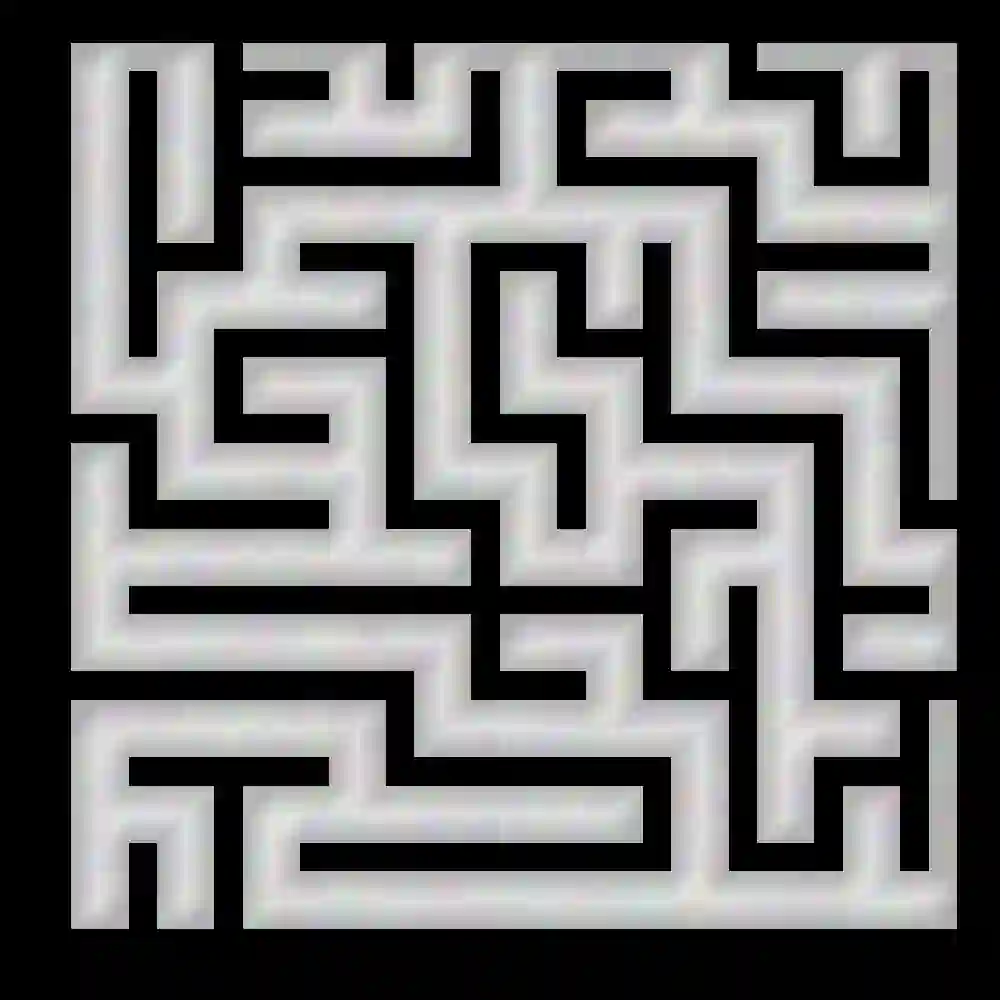
With the explosive influence caused by the success of large language models (LLM) like ChatGPT and GPT-4, there has been an extensive amount of recent work showing that foundation models can be used to solve a large variety of tasks. However, there is very limited work that shares insights on multi-agent planning. Multi-agent planning is different from other domains by combining the difficulty of multi-agent coordination and planning, and making it hard to leverage external tools to facilitate the reasoning needed. In this paper, we focus on the problem of multi-agent path finding (MAPF), which is also known as multi-robot route planning, and study the performance of solving MAPF with LLMs. We first show the motivating success on an empty room map without obstacles, then the failure to plan on the harder room map and maze map of the standard MAPF benchmark. We present our position on why directly solving MAPF with LLMs has not been successful yet, and we use various experiments to support our hypothesis. Based on our results, we discussed how researchers with different backgrounds could help with this problem from different perspectives.
翻译:随着ChatGPT和GPT-4等大语言模型(LLM)成功的爆炸性影响,近期大量研究表明基础模型可用于解决多种任务。然而,关于多智能体规划的洞见性研究却十分有限。多智能体规划因结合了多智能体协调与规划的难度,且难以借助外部工具辅助必要推理,而与其他领域存在显著差异。本文聚焦多智能体路径规划(MAPF)问题——亦称多机器人路径规划,研究利用LLM求解MAPF的性能。我们首先展示了在无障碍空房间地图上的成功激励案例,随后揭示了在标准MAPF基准测试中更复杂的房间地图和迷宫地图上的规划失败现象。我们阐述了为何直接使用LLM解决MAPF尚未取得成功的立场,并通过多项实验验证假设。基于研究结果,我们探讨了不同学科背景的研究人员如何从多元视角助力该问题的解决。