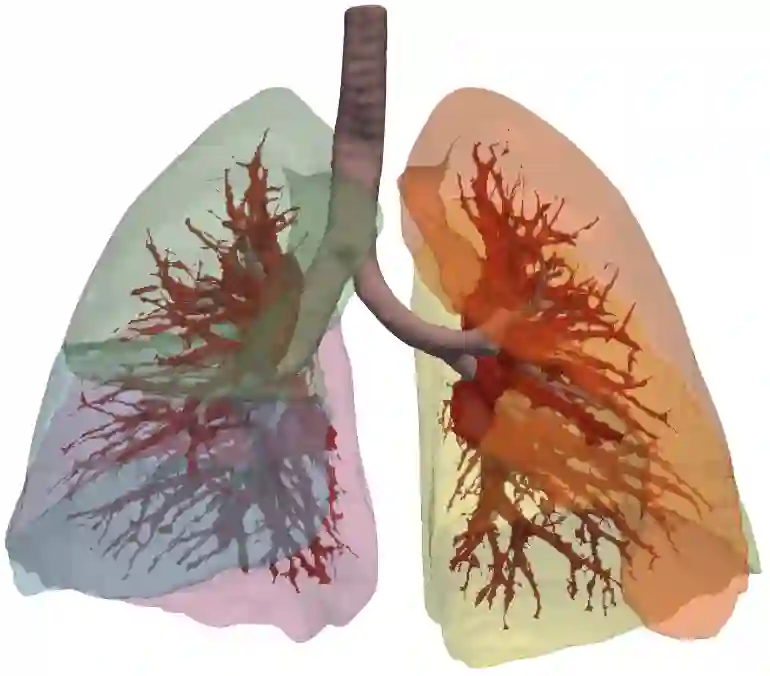
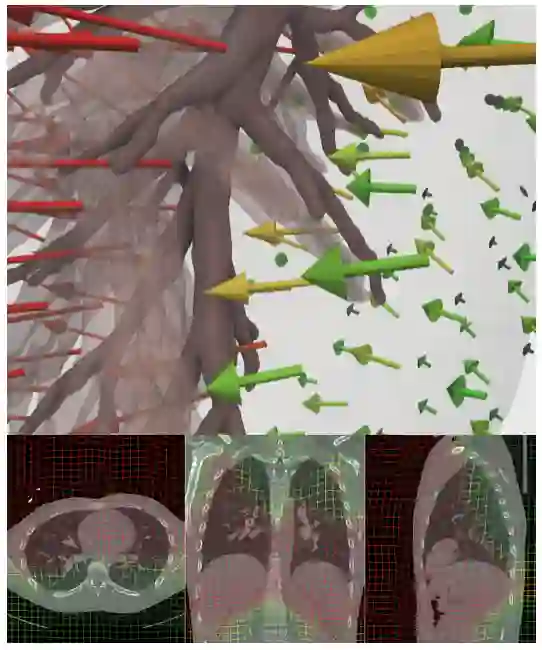
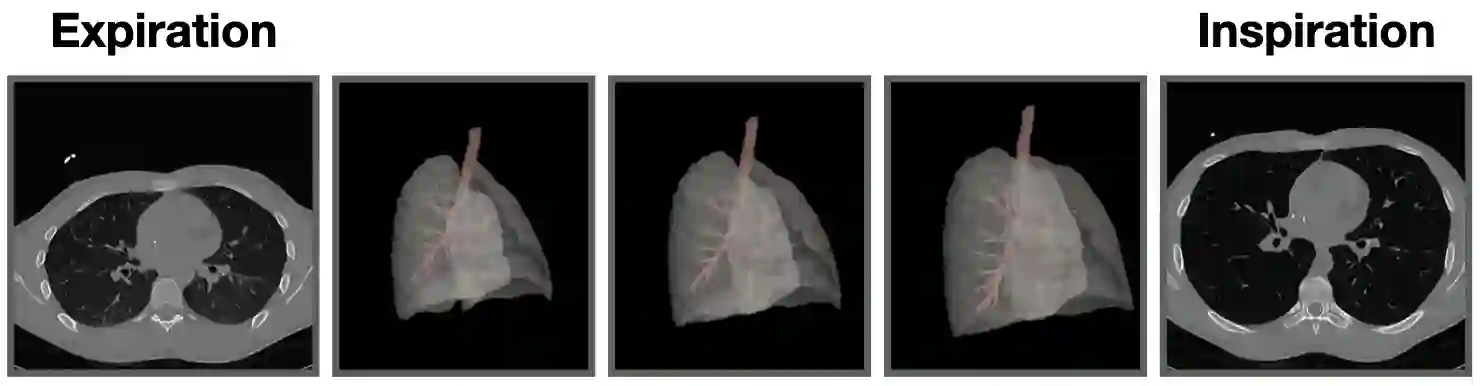
Anatomical models of a medical robot's environment can significantly help guide design and development of a new robotic system. These models can be used for benchmarking motion planning algorithms, evaluating controllers, optimizing mechanical design choices, simulating procedures, and even as resources for data generation. Currently, the time-consuming task of generating these environments is repeatedly performed by individual research groups and rarely shared broadly. This not only leads to redundant efforts, but also makes it challenging to compare systems and algorithms accurately. In this work, we present a collection of clinically-relevant anatomical environments for medical robots operating in the lungs. Since anatomical deformation is a fundamental challenge for medical robots operating in the lungs, we describe a way to model respiratory deformation in these environments using patient-derived data. We share the environments and deformation data publicly by adding them to the Medical Robotics Anatomical Dataset (Med-RAD), our public dataset of anatomical environments for medical robots.
翻译:医疗机器人的解剖环境模型能显著指导新型机器人系统的设计与开发。这些模型可用于运动规划算法的基准测试、控制器评估、机械设计优化、手术流程仿真,甚至作为数据生成资源。当前,生成这些环境的高耗时任务往往由各研究团队重复完成,且很少进行广泛共享。这不仅导致重复劳动,还使得系统和算法的准确比较变得困难。本文针对肺部医疗机器人,提出一组具有临床意义的解剖环境。鉴于解剖变形是肺部手术机器人的根本性挑战,我们描述了一种利用患者衍生数据对这些环境中的呼吸变形进行建模的方法。通过将环境与变形数据纳入医疗机器人解剖数据集(Med-RAD,面向医疗机器人的公共解剖环境数据集),我们已将其公开共享。