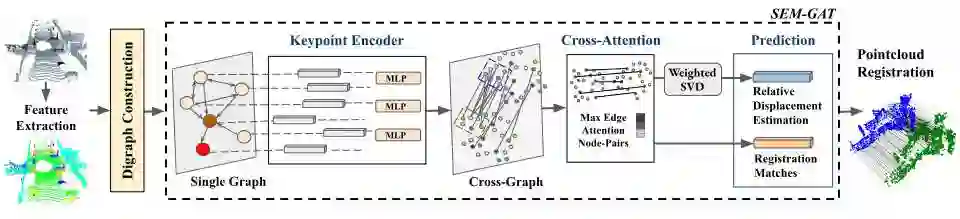
This paper proposes a GNN-based method for exploiting semantics and local geometry to guide the identification of reliable pointcloud registration candidates. Semantic and morphological features of the environment serve as key reference points for registration, enabling accurate lidar-based pose estimation. Our novel lightweight static graph structure informs our attention-based keypoint node aggregation GNN network by identifying semantic instance-based relationships, acting as inductive bias to significantly reduce the computational burden of pointcloud registration. By connecting candidate nodes and exploiting cross-graph attention, we identify confidence scores for all potential registration correspondences, estimating the displacement between pointcloud scans. Our pipeline enables introspective analysis of the model's performance by correlating it with the individual contributions of local structures in the environment, providing valuable insights into the system's behaviour. We test our method on the KITTI odometry dataset, achieving competitive accuracy compared to benchmark methods and a higher track smoothness while relying on significantly fewer network parameters.
翻译:本文提出一种基于图神经网络(GNN)的方法,通过利用语义与局部几何特征来引导可靠点云配准候选的识别。环境中的语义与形态特征作为配准的关键参考点,可实现基于激光雷达的精确位姿估计。我们设计的新型轻量级静态图结构,通过识别基于语义实例的关系来指导基于注意力的关键点节点聚合GNN网络,这种归纳偏置显著降低了点云配准的计算负担。通过连接候选节点并利用跨图注意力机制,我们为所有潜在配准对应关系生成置信度分数,从而估计点云扫描间的位移量。所提出的框架通过将模型性能与环境局部结构的个体贡献相关联,支持对模型行为的反思性分析,为系统行为提供有价值的见解。我们在KITTI里程计数据集上测试该方法,在显著减少网络参数量的同时,达到了与基准方法相当的精度和更高的轨迹平滑度。